
Page 123 - Innovations in Intelligent Machines
P. 123
114 A. Pongpunwattana and R. Rysdyk
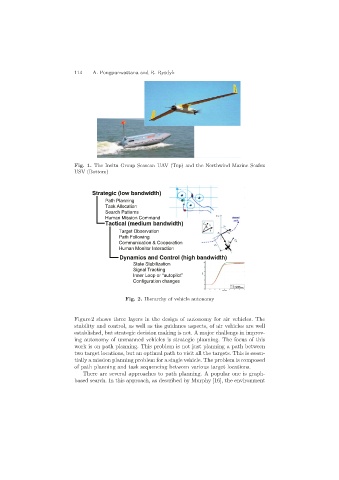
Fig. 1. The Insitu Group Seascan UAV (Top) and the Northwind Marine Seafox
USV (Bottom)
Strategic (low bandwidth)
Path Planning
Task Allocation
Search Patterns
Human Mission Command
Tactical (medium bandwidth)
Target Observation
Path Following
Communication & Cooperation
Human Monitor Interaction
Dynamics and Control (high bandwidth)
State Stabilization
Signal Tracking
Inner Loop or “autopilot”
Configuration changes
Fig. 2. Hierarchy of vehicle autonomy
Figure 2 shows three layers in the design of autonomy for air vehicles. The
stability and control, as well as the guidance aspects, of air vehicles are well
established, but strategic decision making is not. A major challenge in improv-
ing autonomy of unmanned vehicles is strategic planning. The focus of this
work is on path planning. This problem is not just planning a path between
two target locations, but an optimal path to visit all the targets. This is essen-
tially a mission planning problem for a single vehicle. The problem is composed
of path planning and task sequencing between various target locations.
There are several approaches to path planning. A popular one is graph-
based search. In this approach, as described by Murphy [16], the environment