
Page 127 - Innovations in Intelligent Machines
P. 127
118 A. Pongpunwattana and R. Rysdyk
World
F F
V
x ref x ref z (k)
Path Q(k) Command u(k) Vehicle x(k)
V
Planner Generator a (k) Environment
F
x ref Q(k)
X([s ,N] k) x(k)
p
x(k)
State Predictor
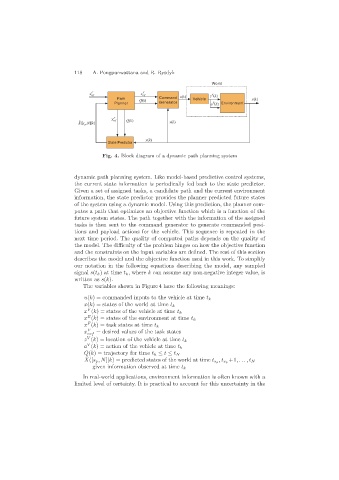
Fig. 4. Block diagram of a dynamic path planning system
dynamic path planning system. Like model-based predictive control systems,
the current state information is periodically fed back to the state predictor.
Given a set of assigned tasks, a candidate path and the current environment
information, the state predictor provides the planner predicted future states
of the system using a dynamic model. Using this prediction, the planner com-
putes a path that optimizes an objective function which is a function of the
future system states. The path together with the information of the assigned
tasks is then sent to the command generator to generate commanded posi-
tions and payload actions for the vehicle. This sequence is repeated in the
next time period. The quality of computed paths depends on the quality of
the model. The difficulty of the problem hinges on how the objective function
and the constraints on the input variables are defined. The rest of this section
describes the model and the objective function used in this work. To simplify
our notation in the following equations describing the model, any sampled
signal s(t k ) at time t k , where k can assume any non-negative integer value, is
written as s(k).
The variables shown in Figure 4 have the following meanings:
u(k) = commanded inputs to the vehicle at time t k
x(k) = states of the world at time t k
V
x (k) = states of the vehicle at time t k
E
x (k) = states of the environment at time t k
F
x (k) = task states at time t k
x F = desired values of the task states
ref
V
z (k) = location of the vehicle at time t k
V
a (k) = action of the vehicle at time t k
Q(k) = trajectory for time t k ≤ t ≤ t N
ˆ
X([s p ,N]|k) = predicted states of the world at time t s p ,t s p +1,...,t N
given information observed at time t k
In real-world applications, environment information is often known with a
limited level of certainty. It is practical to account for this uncertainty in the