
Page 123 - Introduction to AI Robotics
P. 123
106
Combine 4 The Reactive Paradigm
Extract Features Plan Task Motor
Sensors Features into Tasks Execution Control Actuators
Model
SENSE PLAN ACT
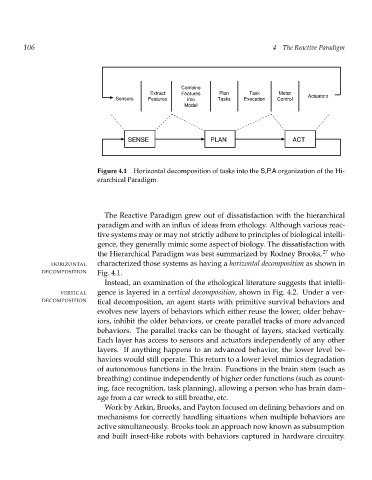
Figure 4.1 Horizontal decomposition of tasks into the S,P,A organization of the Hi-
erarchical Paradigm.
The Reactive Paradigm grew out of dissatisfaction with the hierarchical
paradigm and with an influx of ideas from ethology. Although various reac-
tive systems may or may not strictly adhere to principles of biological intelli-
gence, they generally mimic some aspect of biology. The dissatisfaction with
the Hierarchical Paradigm was best summarized by Rodney Brooks, 27 who
HORIZONTAL characterized those systems as having a horizontal decomposition as shown in
DECOMPOSITION Fig. 4.1.
Instead, an examination of the ethological literature suggests that intelli-
VERTICAL gence is layered in a vertical decomposition, shown in Fig. 4.2. Under a ver-
DECOMPOSITION tical decomposition, an agent starts with primitive survival behaviors and
evolves new layers of behaviors which either reuse the lower, older behav-
iors, inhibit the older behaviors, or create parallel tracks of more advanced
behaviors. The parallel tracks can be thought of layers, stacked vertically.
Each layer has access to sensors and actuators independently of any other
layers. If anything happens to an advanced behavior, the lower level be-
haviors would still operate. This return to a lower level mimics degradation
of autonomous functions in the brain. Functions in the brain stem (such as
breathing) continue independently of higher order functions (such as count-
ing, face recognition, task planning), allowing a person who has brain dam-
age from a car wreck to still breathe, etc.
Work by Arkin, Brooks, and Payton focused on defining behaviors and on
mechanisms for correctly handling situations when multiple behaviors are
active simultaneously. Brooks took an approach now known as subsumption
and built insect-like robots with behaviors captured in hardware circuitry.