
Page 127 - Introduction to AI Robotics
P. 127
110
behavior 4 The Reactive Paradigm
percept
Perceptual Motor
Schema Schema
behavior
percept
Perceptual Motor
Schema Schema
behavior
percept
Perceptual Motor
Schema Schema
sensor 1 sensor 2 actuators
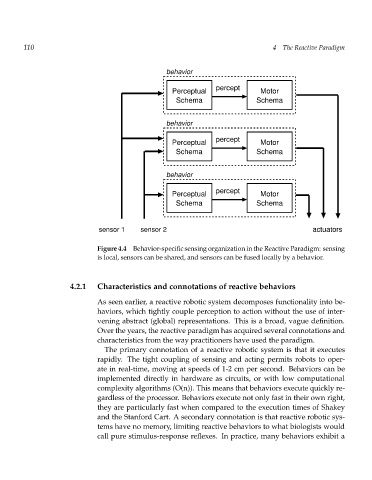
Figure 4.4 Behavior-specific sensing organization in the Reactive Paradigm: sensing
is local, sensors can be shared, and sensors can be fused locally by a behavior.
4.2.1 Characteristics and connotations of reactive behaviors
As seen earlier, a reactive robotic system decomposes functionality into be-
haviors, which tightly couple perception to action without the use of inter-
vening abstract (global) representations. This is a broad, vague definition.
Over the years, the reactive paradigm has acquired several connotations and
characteristics from the way practitioners have used the paradigm.
The primary connotation of a reactive robotic system is that it executes
rapidly. The tight coupling of sensing and acting permits robots to oper-
ate in real-time, moving at speeds of 1-2 cm per second. Behaviors can be
implemented directly in hardware as circuits, or with low computational
complexity algorithms (O(n)). This means that behaviors execute quickly re-
gardless of the processor. Behaviors execute not only fast in their own right,
they are particularly fast when compared to the execution times of Shakey
and the Stanford Cart. A secondary connotation is that reactive robotic sys-
tems have no memory, limiting reactive behaviors to what biologists would
call pure stimulus-response reflexes. In practice, many behaviors exhibit a