
Page 133 - Introduction to AI Robotics
P. 133
116
FEEL RUN 4 The Reactive Paradigm
FORCE AWAY TURN
force heading
polar
SONAR heading encoders
plot
COLLIDE FORWARD
halt
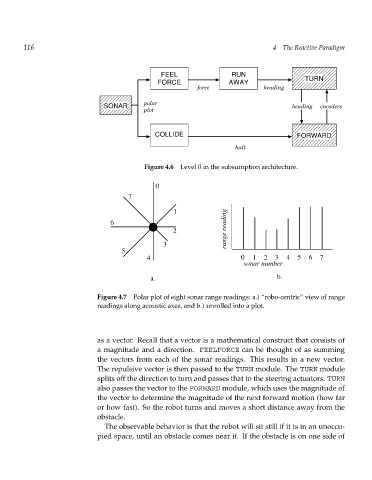
Figure 4.6 Level 0 in the subsumption architecture.
0
7
1
6
2 range reading
3
5
4 0 1 2 3 4 5 6 7
sonar number
a. b.
Figure 4.7 Polar plot of eight sonar range readings: a.) “robo-centric” view of range
readings along acoustic axes, and b.) unrolled into a plot.
as a vector. Recall that a vector is a mathematical construct that consists of
a magnitude and a direction. FEELFORCE can be thought of as summing
the vectors from each of the sonar readings. This results in a new vector.
Therepulsivevectoris thenpassedtothe TURN module. The TURN module
splits off the direction to turn and passes that to the steering actuators. TURN
also passes the vector to the FORWARD module, which uses the magnitude of
the vector to determine the magnitude of the next forward motion (how far
or how fast). So the robot turns and moves a short distance away from the
obstacle.
The observable behavior is that the robot will sit still if it is in an unoccu-
pied space, until an obstacle comes near it. If the obstacle is on one side of