
Page 138 - Introduction to AI Robotics
P. 138
4.3 Subsumption Architecture
distance, direction traveled 121
STAYIN INTEGRATE
LOOK
MIDDLE
corridor
heading
to middle
S
WANDER AVOID
modified
heading
force
FEEL RUN
FORCE AWAY S TURN
force
heading
polar
SONAR heading encoders
plot
COLLIDE FORWARD
halt
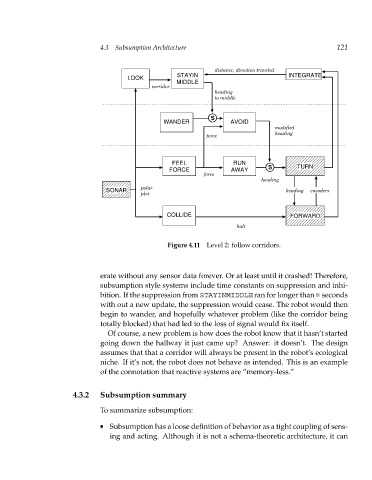
Figure 4.11 Level 2: follow corridors.
erate without any sensor data forever. Or at least until it crashed! Therefore,
subsumption style systems include time constants on suppression and inhi-
bition. If the suppression from STAYINMIDDLE ran for longer than n seconds
with out a new update, the suppression would cease. The robot would then
begin to wander, and hopefully whatever problem (like the corridor being
totally blocked) that had led to the loss of signal would fix itself.
Of course, a new problem is how does the robot know that it hasn’t started
going down the hallway it just came up? Answer: it doesn’t. The design
assumes that that a corridor will always be present in the robot’s ecological
niche. If it’s not, the robot does not behave as intended. This is an example
of the connotation that reactive systems are “memory-less.”
4.3.2 Subsumption summary
To summarize subsumption:
Subsumption has a loose definition of behavior as a tight coupling of sens-
ing and acting. Although it is not a schema-theoretic architecture, it can