
Page 135 - Introduction to AI Robotics
P. 135
118
heading 4 The Reactive Paradigm
WANDER AVOID
modified
heading
force
FEEL RUN
FORCE AWAY S TURN
force
heading
polar
SONAR heading encoders
plot
COLLIDE FORWARD
halt
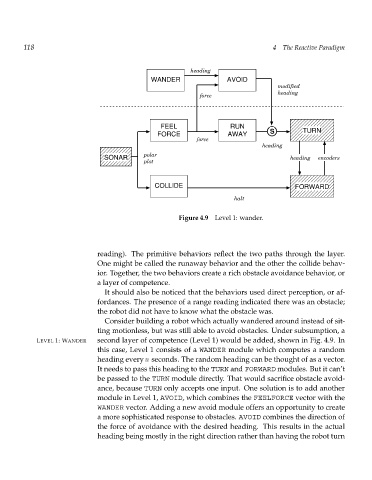
Figure 4.9 Level 1: wander.
reading). The primitive behaviors reflect the two paths through the layer.
One might be called the runaway behavior and the other the collide behav-
ior. Together, the two behaviors create a rich obstacle avoidance behavior, or
a layer of competence.
It should also be noticed that the behaviors used direct perception, or af-
fordances. The presence of a range reading indicated there was an obstacle;
the robot did not have to know what the obstacle was.
Consider building a robot which actually wandered around instead of sit-
ting motionless, but was still able to avoid obstacles. Under subsumption, a
LEVEL 1: WANDER second layer of competence (Level 1) would be added, shown in Fig. 4.9. In
this case, Level 1 consists of a WANDER module which computes a random
heading every n seconds. The random heading can be thought of as a vector.
It needs to pass this heading to the TURN and FORWARD modules. But it can’t
be passed to the TURN module directly. That would sacrifice obstacle avoid-
ance, because TURN only accepts one input. One solution is to add another
module in Level 1, AVOID, which combines the FEELFORCE vector with the
WANDER vector. Adding a new avoid module offers an opportunity to create
a more sophisticated response to obstacles. AVOID combines the direction of
the force of avoidance with the desired heading. This results in the actual
heading being mostly in the right direction rather than having the robot turn