
Page 155 - Introduction to AI Robotics
P. 155
138
4 The Reactive Paradigm
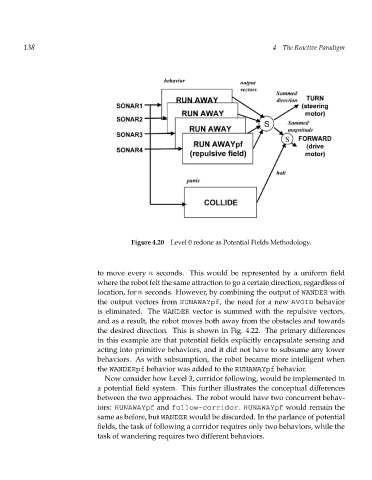
Figure 4.20 Level 0 redone as Potential Fields Methodology.
to move every n seconds. This would be represented by a uniform field
where the robot felt the same attraction to go a certain direction, regardless of
location, for n seconds. However, by combining the output of WANDER with
the output vectors from RUNAWAYpf, the need for a new AVOID behavior
is eliminated. The WANDER vector is summed with the repulsive vectors,
and as a result, the robot moves both away from the obstacles and towards
the desired direction. This is shown in Fig. 4.22. The primary differences
in this example are that potential fields explicitly encapsulate sensing and
acting into primitive behaviors, and it did not have to subsume any lower
behaviors. As with subsumption, the robot became more intelligent when
the WANDERpf behavior was added to the RUNAWAYpf behavior.
Now consider how Level 3, corridor following, would be implemented in
a potential field system. This further illustrates the conceptual differences
between the two approaches. The robot would have two concurrent behav-
iors: RUNAWAYpf and follow-corridor. RUNAWAYpf would remain the
same as before, but WANDER would be discarded. In the parlance of potential
fields, the task of following a corridor requires only two behaviors, while the
task of wandering requires two different behaviors.