
Page 151 - Introduction to AI Robotics
P. 151
134
4 The Reactive Paradigm
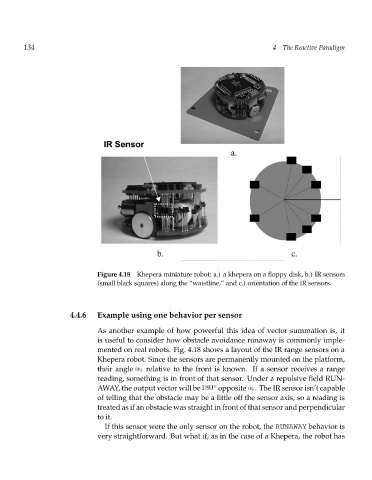
Figure 4.18 Khepera miniature robot: a.) a khepera on a floppy disk, b.) IR sensors
(small black squares) along the “waistline,” and c.) orientation of the IR sensors.
4.4.6 Example using one behavior per sensor
As another example of how powerful this idea of vector summation is, it
is useful to consider how obstacle avoidance runaway is commonly imple-
mented on real robots. Fig. 4.18 shows a layout of the IR range sensors on a
Khepera robot. Since the sensors are permanently mounted on the platform,
their angle i relative to the front is known. If a sensor receives a range
reading, something is in front of that sensor. Under a repulsive field RUN-
AWAY, the output vector will be 180 opposite i . The IR sensor isn’t capable
of telling that the obstacle may be a little off the sensor axis, so a reading is
treated as if an obstacle was straight in front of that sensor and perpendicular
to it.
If this sensor were the only sensor on the robot, the RUNAWAY behavior is
very straightforward. But what if, as in the case of a Khepera, the robot has