
Page 148 - Introduction to AI Robotics
P. 148
131
4.4 Potential Fields Methodologies
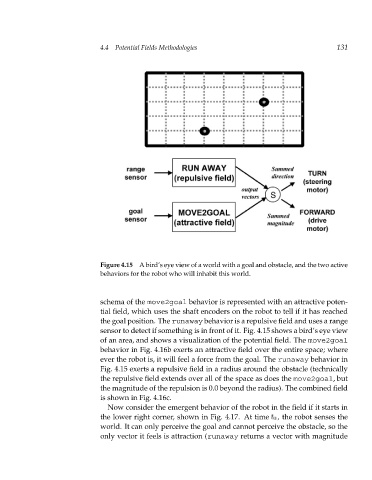
Figure 4.15 A bird’s eye view of a world with a goal and obstacle, and the two active
behaviors for the robot who will inhabit this world.
schema of the move2goal behavior is represented with an attractive poten-
tial field, which uses the shaft encoders on the robot to tell if it has reached
the goal position. The runaway behavior is a repulsive field and uses a range
sensor to detect if something is in front of it. Fig. 4.15 shows a bird’s eye view
of an area, and shows a visualization of the potential field. The move2goal
behavior in Fig. 4.16b exerts an attractive field over the entire space; where
ever the robot is, it will feel a force from the goal. The runaway behavior in
Fig. 4.15 exerts a repulsive field in a radius around the obstacle (technically
the repulsive field extends over all of the space as does the move2goal,but
the magnitude of the repulsion is 0.0 beyond the radius). The combined field
is shown in Fig. 4.16c.
Now consider the emergent behavior of the robot in the field if it starts in
the lower right corner, shown in Fig. 4.17. At time t 0 , the robot senses the
world. It can only perceive the goal and cannot perceive the obstacle, so the
only vector it feels is attraction (runaway returns a vector with magnitude