
Page 198 - Introduction to AI Robotics
P. 198
5.5 Assemblages of Behaviors
EMPTY 181
3 tries
FULL
EMPTY and
NO_RED
on Wander Move FULL Grab
Start for EMPTY and to Trash
Trash SEE_RED Trash
EMPTY
FULL and
EMPTY NO_BLUE
FULL and FULL and
EMPTY
SEE_BLUE SEE_BLUE
Move Wander
Drop to for
Trash FULL and Trashcan Trashcan
AT_BLUE FULL and
NO_BLUE
a.
K = fwander for trash, move to trash, grab trash, wander for trash can,
move to trash can, drop trash g, fon, EMPTY, FULL, SEE_RED, =
NO_BLUE, SEE_BLUE, AT_BLUEg, s = Start , F = K
q (q ;
)
start on wander for trash
wander for trash EMPTY, SEE_RED move to trash
wander for trash FULL grab trash
move to trash FULL grab trash
move to trash EMPTY, NO_RED wander for trash
grab trash FULL, NO_BLUE wander for trash can
grab trash FULL, SEE_BLUE move to trash can
grab trash EMPTY wander for trash
wander for trash can EMPTY wander for trash
wander for trash can FULL, SEE_BLUE move to trash can
move to trash can EMPTY wander for trash
move to trash can FULL, AT_BLUE drop trash
drop trash EMPTY wander for trash
b.
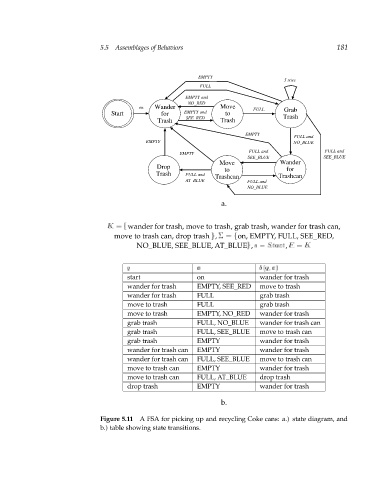
Figure 5.11 A FSA for picking up and recycling Coke cans: a.) state diagram, and
b.) table showing state transitions.