
Page 200 - Introduction to AI Robotics
P. 200
5.5 Assemblages of Behaviors
AT_BLUE 183
looming(blue,size=N) drop-trash
c x
extract-color(blue) move-to-goal(trashcan) S I heading
EMPTY
gripper-status FULL
grab_trash
c x
extract-color(red) move-to-goal(trash) I S
heading
Level 1 heading
wander S
avoid
Level 0
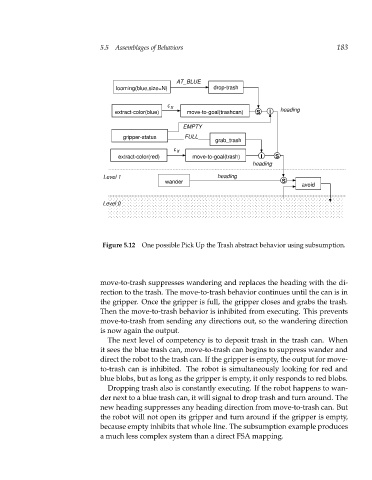
Figure 5.12 One possible Pick Up the Trash abstract behavior using subsumption.
move-to-trash suppresses wandering and replaces the heading with the di-
rection to the trash. The move-to-trash behavior continues until the can is in
the gripper. Once the gripper is full, the gripper closes and grabs the trash.
Then the move-to-trash behavior is inhibited from executing. This prevents
move-to-trash from sending any directions out, so the wandering direction
is now again the output.
The next level of competency is to deposit trash in the trash can. When
it sees the blue trash can, move-to-trash can begins to suppress wander and
direct the robot to the trash can. If the gripper is empty, the output for move-
to-trash can is inhibited. The robot is simultaneously looking for red and
blue blobs, but as long as the gripper is empty, it only responds to red blobs.
Dropping trash also is constantly executing. If the robot happens to wan-
der next to a blue trash can, it will signal to drop trash and turn around. The
new heading suppresses any heading direction from move-to-trash can. But
the robot will not open its gripper and turn around if the gripper is empty,
because empty inhibits that whole line. The subsumption example produces
a much less complex system than a direct FSA mapping.