
Page 265 - Introduction to AI Robotics
P. 265
248
shaft 6 Common Sensing Techniques for Reactive Robots
sonars
encoders
map:
evidence grid thermal
at waypoint
OR
waypoint food removed serving food: vision
navigation: finding faces,
move to goal, counting treat
avoid time limit removal laser range
serving exceeded
full food
tray depleted sonars
awaiting
refill:
finding faces
vision thermal
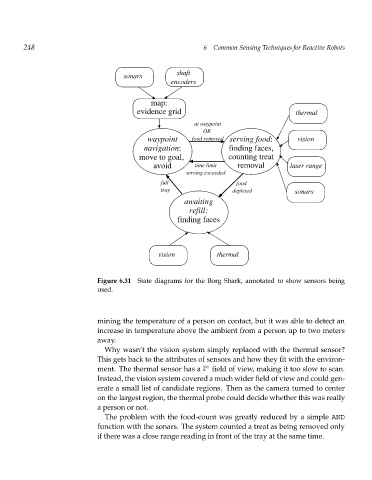
Figure 6.31 State diagrams for the Borg Shark, annotated to show sensors being
used.
mining the temperature of a person on contact, but it was able to detect an
increase in temperature above the ambient from a person up to two meters
away.
Why wasn’t the vision system simply replaced with the thermal sensor?
This gets back to the attributes of sensors and how they fit with the environ-
ment. The thermal sensor has a 2 field of view, making it too slow to scan.
Instead, the vision system covered a much wider field of view and could gen-
erate a small list of candidate regions. Then as the camera turned to center
on the largest region, the thermal probe could decide whether this was really
a person or not.
The problem with the food-count was greatly reduced by a simple AND
function with the sonars. The system counted a treat as being removed only
if there was a close range reading in front of the tray at the same time.