
Page 298 - Introduction to AI Robotics
P. 298
7.6 Model-Oriented Architectures
Task Scheduling Mission Planner 281
(PRODIGY)
Path Planning Cartographer
Global
World
Models Navigation
Sequencer,
(POMDP) Resource Manager
Deliberative Layer
Obstacle Avoidance Reactive Layer
(CVM)
Sensors Effectors
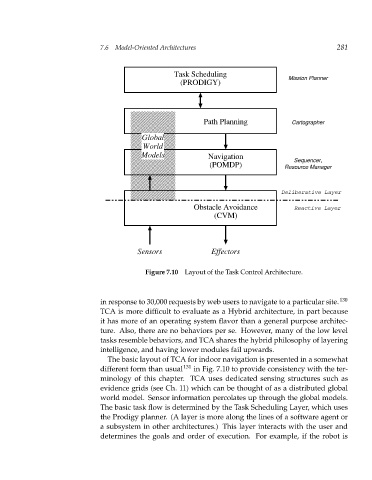
Figure 7.10 Layout of the Task Control Architecture.
in response to 30,000 requests by web users to navigate to a particular site. 130
TCA is more difficult to evaluate as a Hybrid architecture, in part because
it has more of an operating system flavor than a general purpose architec-
ture. Also, there are no behaviors per se. However, many of the low level
tasks resemble behaviors, and TCA shares the hybrid philosophy of layering
intelligence, and having lower modules fail upwards.
The basic layout of TCA for indoor navigation is presented in a somewhat
different form than usual 131 in Fig. 7.10 to provide consistency with the ter-
minology of this chapter. TCA uses dedicated sensing structures such as
evidence grids (see Ch. 11) which can be thought of as a distributed global
world model. Sensor information percolates up through the global models.
The basic task flow is determined by the Task Scheduling Layer, which uses
the Prodigy planner. (A layer is more along the lines of a software agent or
a subsystem in other architectures.) This layer interacts with the user and
determines the goals and order of execution. For example, if the robot is