
Page 296 - Introduction to AI Robotics
P. 296
7.6 Model-Oriented Architectures
Resource Manager, 279
Mission Planner,
Performance Monitoring Agent
PRS-Lite
(planning agent)
Software
Agents
Cartographer
People-
Topological
Tracking
Planner
Local Perceptual
Object Space(LPS)
Recognition Sequencer
Surface
Navigation
Construction
Tasks
Virtual
Localization,
Sensors
Map Maintenance
Deliberative Layer
Reactive layer
Sensors
Reactive Fuzzy
Actuators
Behaviors Logic
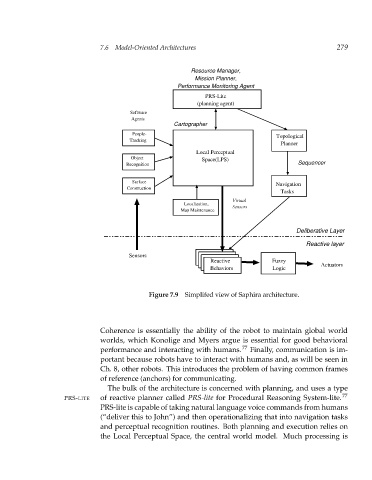
Figure 7.9 Simplifed view of Saphira architecture.
Coherence is essentially the ability of the robot to maintain global world
worlds, which Konolige and Myers argue is essential for good behavioral
performance and interacting with humans. 77 Finally, communication is im-
portant because robots have to interact with humans and, as will be seen in
Ch. 8, other robots. This introduces the problem of having common frames
of reference (anchors) for communicating.
The bulk of the architecture is concerned with planning, and uses a type
PRS-LITE of reactive planner called PRS-lite for Procedural Reasoning System-lite. 77
PRS-lite is capable of taking natural language voice commands from humans
(“deliver this to John”) and then operationalizing that into navigation tasks
and perceptual recognition routines. Both planning and execution relies on
the Local Perceptual Space, the central world model. Much processing is