
Page 291 - Introduction to AI Robotics
P. 291
274
7
The Hybrid Deliberative/Reactive Paradigm
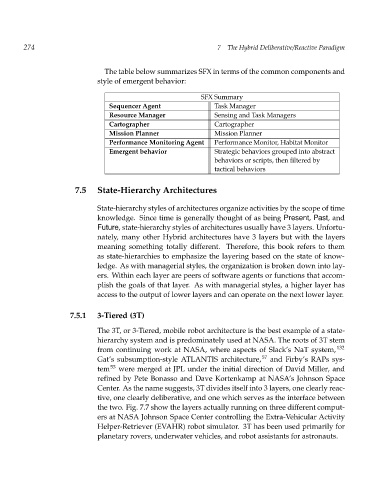
The table below summarizes SFX in terms of the common components and
style of emergent behavior:
SFX Summary
Sequencer Agent Task Manager
Resource Manager Sensing and Task Managers
Cartographer Cartographer
Mission Planner Mission Planner
Performance Monitoring Agent Performance Monitor, Habitat Monitor
Emergent behavior Strategic behaviors grouped into abstract
behaviors or scripts, then filtered by
tactical behaviors
7.5 State-Hierarchy Architectures
State-hierarchy styles of architectures organize activities by the scope of time
knowledge. Since time is generally thought of as being Present, Past,and
Future, state-hierarchy styles of architectures usually have 3 layers. Unfortu-
nately, many other Hybrid architectures have 3 layers but with the layers
meaning something totally different. Therefore, this book refers to them
as state-hierarchies to emphasize the layering based on the state of know-
ledge. As with managerial styles, the organization is broken down into lay-
ers. Within each layer are peers of software agents or functions that accom-
plish the goals of that layer. As with managerial styles, a higher layer has
access to the output of lower layers and can operate on the next lower layer.
7.5.1 3-Tiered (3T)
The 3T, or 3-Tiered, mobile robot architecture is the best example of a state-
hierarchy system and is predominately used at NASA. The roots of 3T stem
from continuing work at NASA, where aspects of Slack’s NaT system, 132
Gat’s subsumption-style ATLANTIS architecture, 57 and Firby’s RAPs sys-
tem 53 were merged at JPL under the initial direction of David Miller, and
refined by Pete Bonasso and Dave Kortenkamp at NASA’s Johnson Space
Center. As the name suggests, 3T divides itself into 3 layers, one clearly reac-
tive, one clearly deliberative, and one which serves as the interface between
the two. Fig. 7.7 show the layers actually running on three different comput-
ers at NASA Johnson Space Center controlling the Extra-Vehicular Activity
Helper-Retriever (EVAHR) robot simulator. 3T has been used primarily for
planetary rovers, underwater vehicles, and robot assistants for astronauts.