
Page 294 - Introduction to AI Robotics
P. 294
277
7.6 Model-Oriented Architectures
disappears). The components in the Sequencer layer operate on state infor-
mation reflecting memories about the Past, aswell asthe Present. Therefore,
sequences of behaviors can be managed by remembering what the robot has
already done and whether that was successful or not. This adds a great
deal of robustness and supports performance monitoring. The Planner layer
works with state information predicting the Future. It can also use informa-
tion from the Past (what the robot has done or tried) and Present (what the
robot is doing right now). In order to plan a mission, the planner needs to
project what the environment will be and other factors.
In practice, 3T does not strictly organize its functions into layers by state
UPDATE RATE. (Past, Present, Future); instead it often uses update rate. Algorithms that
update slowly are put in the Planner, while fast algorithms go in the Skill
Manager layer. This appears to be a situation where the pragmatic consider-
ations of computation influenced the design rules; in the early 1990’s behav-
iors were very fast, reactive planning (especially RAPs and Universal Plans)
were fast, and mission planning was very slow. However, many sensor algo-
rithms involving computer vision were also slow, so they were placed in the
Planner despite their low-level sensing function.
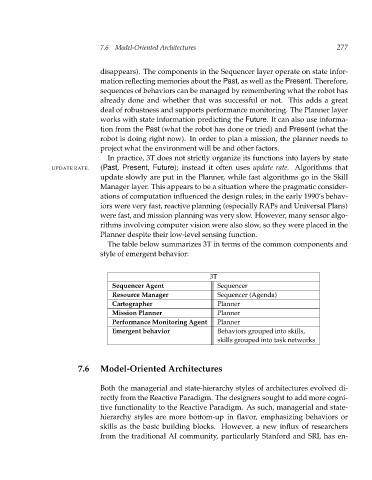
The table below summarizes 3T in terms of the common components and
style of emergent behavior:
3T
Sequencer Agent Sequencer
Resource Manager Sequencer (Agenda)
Cartographer Planner
Mission Planner Planner
Performance Monitoring Agent Planner
Emergent behavior Behaviors grouped into skills,
skills grouped into task networks
7.6 Model-Oriented Architectures
Both the managerial and state-hierarchy styles of architectures evolved di-
rectly from the Reactive Paradigm. The designers sought to add more cogni-
tive functionality to the Reactive Paradigm. As such, managerial and state-
hierarchy styles are more bottom-up in flavor, emphasizing behaviors or
skills as the basic building blocks. However, a new influx of researchers
from the traditional AI community, particularly Stanford and SRI, has en-