
Page 439 - Introduction to AI Robotics
P. 439
422
Localization and Map Making
11
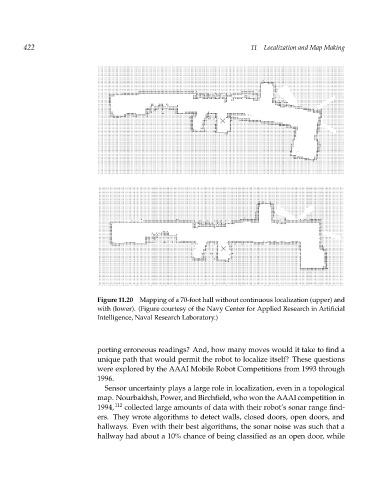
Figure 11.20 Mapping of a 70-foot hall without continuous localization (upper) and
with (lower). (Figure courtesy of the Navy Center for Applied Research in Artificial
Intelligence, Naval Research Laboratory.)
porting erroneous readings? And, how many moves would it take to find a
unique path that would permit the robot to localize itself? These questions
were explored by the AAAI Mobile Robot Competitions from 1993 through
1996.
Sensor uncertainty plays a large role in localization, even in a topological
map. Nourbakhsh, Power, and Birchfield, who won the AAAI competition in
1994, 112 collected large amounts of data with their robot’s sonar range find-
ers. They wrote algorithms to detect walls, closed doors, open doors, and
hallways. Even with their best algorithms, the sonar noise was such that a
hallway had about a 10% chance of being classified as an open door, while