
Page 60 - Introduction to AI Robotics
P. 60
2.2 Attributes of the Hierarchical Paradigm
SENSE PLAN ACT 43
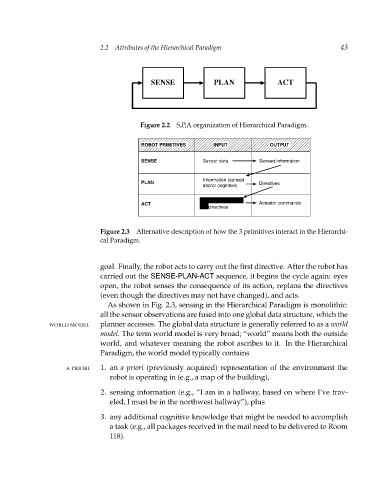
Figure 2.2 S,P,A organization of Hierarchical Paradigm.
ROBOT PRIMITIVES INPUT OUTPUT
SENSE Sensor data Sensed information
Information (sensed
PLAN Directives
and/or cognitive)
Sensed information
ACT Actuator commands
or directives
Figure 2.3 Alternative description of how the 3 primitives interact in the Hierarchi-
cal Paradigm.
goal. Finally, the robot acts to carry out the first directive. After the robot has
carried out the SENSE-PLAN-ACT sequence, it begins the cycle again: eyes
open, the robot senses the consequence of its action, replans the directives
(even though the directives may not have changed), and acts.
As shown in Fig. 2.3, sensing in the Hierarchical Paradigm is monolithic:
all the sensor observations are fused into one global data structure, which the
WORLD MODEL planner accesses. The global data structure is generally referred to as a world
model. The term world model is very broad; “world” means both the outside
world, and whatever meaning the robot ascribes to it. In the Hierarchical
Paradigm, the world model typically contains
APRIORI 1. an a priori (previously acquired) representation of the environment the
robot is operating in (e.g., a map of the building),
2. sensing information (e.g., “I am in a hallway, based on where I’ve trav-
eled, I must be in the northwest hallway”), plus
3. any additional cognitive knowledge that might be needed to accomplish
a task (e.g., all packages received in the mail need to be delivered to Room
118).