
Page 144 - Introduction to Autonomous Mobile Robots
P. 144
Perception
objects contour 129
(x, y, z)
lens l origin lens r
y
x
f z
(x , y ) (x , y )
r
r
l
l
focal plane
b/2 b/2
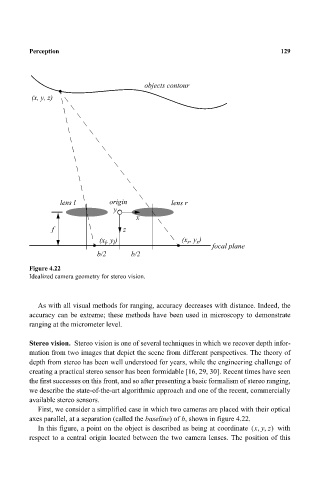
Figure 4.22
Idealized camera geometry for stereo vision.
As with all visual methods for ranging, accuracy decreases with distance. Indeed, the
accuracy can be extreme; these methods have been used in microscopy to demonstrate
ranging at the micrometer level.
Stereo vision. Stereo vision is one of several techniques in which we recover depth infor-
mation from two images that depict the scene from different perspectives. The theory of
depth from stereo has been well understood for years, while the engineering challenge of
creating a practical stereo sensor has been formidable [16, 29, 30]. Recent times have seen
the first successes on this front, and so after presenting a basic formalism of stereo ranging,
we describe the state-of-the-art algorithmic approach and one of the recent, commercially
available stereo sensors.
First, we consider a simplified case in which two cameras are placed with their optical
axes parallel, at a separation (called the baseline) of b, shown in figure 4.22.
In this figure, a point on the object is described as being at coordinate xy z,,( ) with
respect to a central origin located between the two camera lenses. The position of this