
Page 197 - Introduction to Autonomous Mobile Robots
P. 197
182
position Chapter 5
Position Update
(Estimation?)
Prediction of
Encoder matched
Position
(e.g. odometry) observations
YES
Map predicted position
data base Matching
raw sensor data or
extracted features
Perception Observation
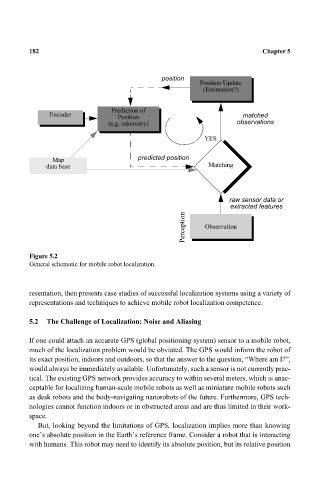
Figure 5.2
General schematic for mobile robot localization.
resentation, then presents case studies of successful localization systems using a variety of
representations and techniques to achieve mobile robot localization competence.
5.2 The Challenge of Localization: Noise and Aliasing
If one could attach an accurate GPS (global positioning system) sensor to a mobile robot,
much of the localization problem would be obviated. The GPS would inform the robot of
its exact position, indoors and outdoors, so that the answer to the question, “Where am I?”,
would always be immediately available. Unfortunately, such a sensor is not currently prac-
tical. The existing GPS network provides accuracy to within several meters, which is unac-
ceptable for localizing human-scale mobile robots as well as miniature mobile robots such
as desk robots and the body-navigating nanorobots of the future. Furthermore, GPS tech-
nologies cannot function indoors or in obstructed areas and are thus limited in their work-
space.
But, looking beyond the limitations of GPS, localization implies more than knowing
one’s absolute position in the Earth’s reference frame. Consider a robot that is interacting
with humans. This robot may need to identify its absolute position, but its relative position