
Page 234 - Introduction to Autonomous Mobile Robots
P. 234
Mobile Robot Localization
R1 R2 219
R1 R2
H1 H1-2 H2 H2-3 H3
H1 H1-2 H2 H2-3 H3
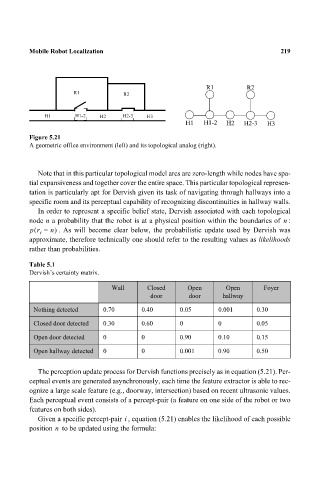
Figure 5.21
A geometric office environment (left) and its topological analog (right).
Note that in this particular topological model arcs are zero-length while nodes have spa-
tial expansiveness and together cover the entire space. This particular topological represen-
tation is particularly apt for Dervish given its task of navigating through hallways into a
specific room and its perceptual capability of recognizing discontinuities in hallway walls.
In order to represent a specific belief state, Dervish associated with each topological
node n a probability that the robot is at a physical position within the boundaries of : n
(
p r = n) . As will become clear below, the probabilistic update used by Dervish was
t
approximate, therefore technically one should refer to the resulting values as likelihoods
rather than probabilities.
Table 5.1
Dervish’s certainty matrix.
Wall Closed Open Open Foyer
door door hallway
Nothing detected 0.70 0.40 0.05 0.001 0.30
Closed door detected 0.30 0.60 0 0 0.05
Open door detected 0 0 0.90 0.10 0.15
Open hallway detected 0 0 0.001 0.90 0.50
The perception update process for Dervish functions precisely as in equation (5.21). Per-
ceptual events are generated asynchronously, each time the feature extractor is able to rec-
ognize a large scale feature (e.g., doorway, intersection) based on recent ultrasonic values.
Each perceptual event consists of a percept-pair (a feature on one side of the robot or two
features on both sides).
i
Given a specific percept-pair , equation (5.21) enables the likelihood of each possible
n
position to be updated using the formula: