
Page 25 - Introduction to Autonomous Mobile Robots
P. 25
10
Knowledge, Mission Chapter 1
Data Base Commands
Localization “Position” Cognition
Map Building Global Map Path Planing
Environment Model Path
Local Map
Information Path
Extraction and Execution
Interpretation
Perception Raw data Actuator Commands Motion Control
Sensing Acting
Real World
Environment
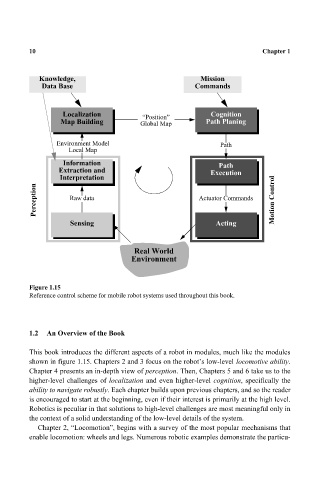
Figure 1.15
Reference control scheme for mobile robot systems used throughout this book.
1.2 An Overview of the Book
This book introduces the different aspects of a robot in modules, much like the modules
shown in figure 1.15. Chapters 2 and 3 focus on the robot’s low-level locomotive ability.
Chapter 4 presents an in-depth view of perception. Then, Chapters 5 and 6 take us to the
higher-level challenges of localization and even higher-level cognition, specifically the
ability to navigate robustly. Each chapter builds upon previous chapters, and so the reader
is encouraged to start at the beginning, even if their interest is primarily at the high level.
Robotics is peculiar in that solutions to high-level challenges are most meaningful only in
the context of a solid understanding of the low-level details of the system.
Chapter 2, “Locomotion”, begins with a survey of the most popular mechanisms that
enable locomotion: wheels and legs. Numerous robotic examples demonstrate the particu-