
Page 56 - Introduction to Autonomous Mobile Robots
P. 56
Locomotion
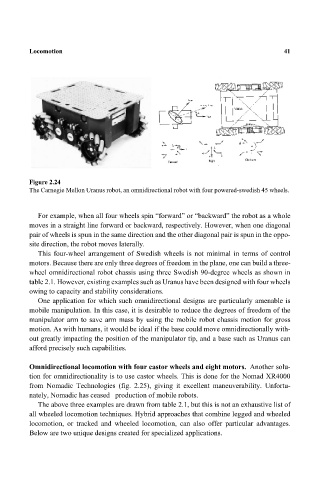
Figure 2.24 41
The Carnegie Mellon Uranus robot, an omnidirectional robot with four powered-swedish 45 wheels.
For example, when all four wheels spin “forward” or “backward” the robot as a whole
moves in a straight line forward or backward, respectively. However, when one diagonal
pair of wheels is spun in the same direction and the other diagonal pair is spun in the oppo-
site direction, the robot moves laterally.
This four-wheel arrangement of Swedish wheels is not minimal in terms of control
motors. Because there are only three degrees of freedom in the plane, one can build a three-
wheel omnidirectional robot chassis using three Swedish 90-degree wheels as shown in
table 2.1. However, existing examples such as Uranus have been designed with four wheels
owing to capacity and stability considerations.
One application for which such omnidirectional designs are particularly amenable is
mobile manipulation. In this case, it is desirable to reduce the degrees of freedom of the
manipulator arm to save arm mass by using the mobile robot chassis motion for gross
motion. As with humans, it would be ideal if the base could move omnidirectionally with-
out greatly impacting the position of the manipulator tip, and a base such as Uranus can
afford precisely such capabilities.
Omnidirectional locomotion with four castor wheels and eight motors. Another solu-
tion for omnidirectionality is to use castor wheels. This is done for the Nomad XR4000
from Nomadic Technologies (fig. 2.25), giving it excellent maneuverability. Unfortu-
nately, Nomadic has ceased production of mobile robots.
The above three examples are drawn from table 2.1, but this is not an exhaustive list of
all wheeled locomotion techniques. Hybrid approaches that combine legged and wheeled
locomotion, or tracked and wheeled locomotion, can also offer particular advantages.
Below are two unique designs created for specialized applications.