
Page 237 - Introduction to Marine Engineering
P. 237
216 Stee ring gear
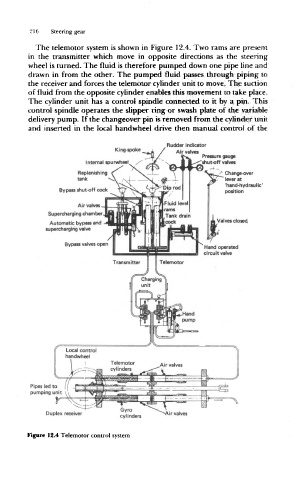
The telemotor system is shown in Figure 12.4. Two rams are present
in the transmitter which move in opposite directions as the steering
wheel is turned. The fluid is therefore pumped down one pipe line and
drawn in from the other. The pumped fluid passes through piping to
the receiver and forces the telemotor cylinder unit to move. The suction
of fluid from the opposite cylinder enables this movement to take place.
The cylinder unit has a control spindle connected to it by a pin. This
control spindle operates the slipper ring or swash plate of the variable
delivery pump. If the changeover pin is removed from the cylinder unit
and inserted in the local handwheel drive then manual control of the
Rudder indicator
King-spoke _ i
Air valves
Pressure gauge
I nternal spu rwheei _ -" " ' ^ shut-off valves
"
Replenishing Change-over
tank lever at
'hand-hydraulic'
By pass shut-off code position
Air valves
Supercharging chamber
Valves closed.
Automatic bypass and
supercharging valve
Bypass valves open
Pipes led to
pumping unit
Gyro
Duplex receiver Air valves
cylinders
Figure 12.4 Telemotor control system