
Page 126 - MEMS and Microstructures in Aerospace Applications
P. 126
Osiander / MEMS and microstructures in Aerospace applications DK3181_c006 Final Proof page 115 2.9.2005 9:38am
Microtechnologies for Space Systems 115
that is, for spacecraft navigation applications, the requirements are for angular bias
stabilities to be in the range of 0.001–0.018/ h. The JPL-developed postresonator
gyroscope (PRG) holds the world record for the performance of MEMS gyroscopes,
9
at 0.18/h. Although, not yet meeting the stringent requirements for spacecraft
navigation, by virtue of its low mass and power consumption, the PRG is being
considered for incorporation into inertial measurement units that are augmented by
other attitude measurement devices such as miniature star trackers or GPS receivers
(for low-Earth orbit [LEO] applications).
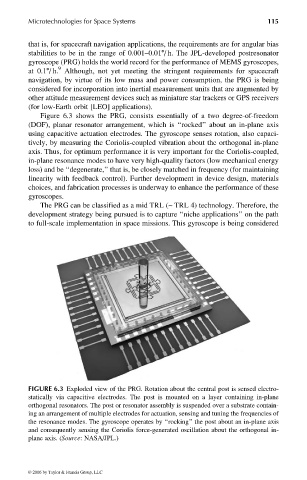
Figure 6.3 shows the PRG, consists essentially of a two degree-of-freedom
(DOF), planar resonator arrangement, which is ‘‘rocked’’ about an in-plane axis
using capacitive actuation electrodes. The gyroscope senses rotation, also capaci-
tively, by measuring the Coriolis-coupled vibration about the orthogonal in-plane
axis. Thus, for optimum performance it is very important for the Coriolis-coupled,
in-plane resonance modes to have very high-quality factors (low mechanical energy
loss) and be ‘‘degenerate,’’ that is, be closely matched in frequency (for maintaining
linearity with feedback control). Further development in device design, materials
choices, and fabrication processes is underway to enhance the performance of these
gyroscopes.
The PRG can be classified as a mid TRL (~ TRL 4) technology. Therefore, the
development strategy being pursued is to capture ‘‘niche applications’’ on the path
to full-scale implementation in space missions. This gyroscope is being considered
FIGURE 6.3 Exploded view of the PRG. Rotation about the central post is sensed electro-
statically via capacitive electrodes. The post is mounted on a layer containing in-plane
orthogonal resonators. The post or resonator assembly is suspended over a substrate contain-
ing an arrangement of multiple electrodes for actuation, sensing and tuning the frequencies of
the resonance modes. The gyroscope operates by ‘‘rocking’’ the post about an in-plane axis
and consequently sensing the Coriolis force-generated oscillation about the orthogonal in-
plane axis. (Source: NASA/JPL.)
© 2006 by Taylor & Francis Group, LLC