
Page 239 - Making PIC Microcontroller Instruments and Controllers
P. 239
PioJECT 3 237
12. As soon as the lower gate has closed, the upper gate opens and stays open till a
marble comes to rcst agahst the Iower gal€. The optical detector will confm this.
13. Tho cycle rcpeats as long as more marbles come down ihe chute.
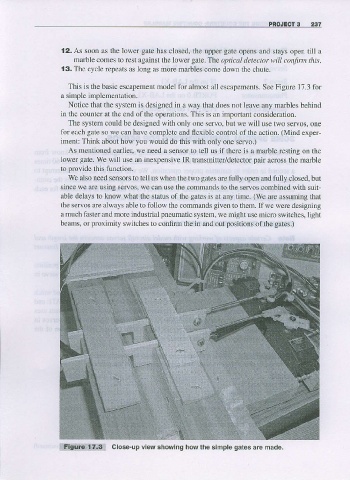
This is the basic escapement model for alnost all escapements. See Figure 17.3 for
a simple implementation.
Notice that the system is designed in a way that does not leave any marbles behhd
in the counter at the end of the opentions. This is an impo ant consideration.
The systom could be designed with only one servo, but we will use two seNos, one
for each gate so we can have complete and flexible control of the action. (Mhd exper-
iment: Think about how you would do this with only one ieflo.)
As mentioned ea ier' we ne€d a sensor.to tell us if there is a marble resting on the
lower gate. We will use an inexpensive IR uansmitter/detector pair across the marble
to provide this function.
We also Ileed sensoN to tell us when the two gates are fully open and firlly closed, but
since we are using soryos, we can use the conmands to the servos combined with suit
able delays to know what the status of the gates is at any time. (W€ are assumitg that
the seNos are always able to follow the commands glven to them. If we were designing
a much faster and more indusldal pneumatic system, we migft use micro switches, light
beams, or proximity switches to confirm the in and out positions ofthe gates.)
Close-up view showing how the simple gates are made.