
Page 241 - Making PIC Microcontroller Instruments and Controllers
P. 241
PnoJECt 3
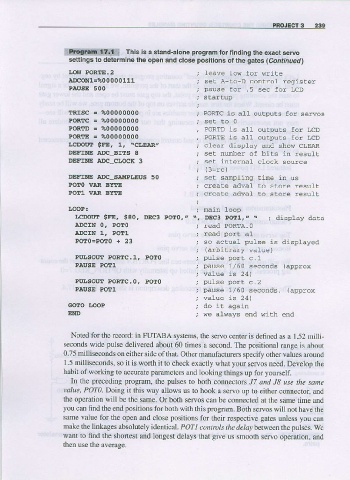
i*i!{ml&$gffi This is a stand-alone program tor finding ihe exact servo
settingsto determinelhe open and close positlons ol the gates (Cont nued)
lJon PoRTE.2 leave low for write
AtcoNl=t6000 00111 set A to D control reqister
PAUSE 5OO pause for .5 sec for LcD
TRISC = %00000000 ouLpuEs ror senos
PoRTC . %00000000
PORTD - %00000000 PoRTD is all ourputs for LcD
POR'E = %00000000 PORTE is all outpuLs for. IJCD
t cDouf $FE, 1, \cDEARz clear display and show CLEAR
DEFINE ADC BITS 8 se! nunber of birs in result
DEFINE ADC CI|oCK 3 se! internal clock source
( 3=rc)
DEFINE A.DC SA,UPITEI'S 50 set sanplins tlne in us
FOTO VAR BYTE creale advaL to store result
POI1 VAR BYTE creare adval to store result
IOOP r
rrcDouT sFE. s80, DEC3 PO:ro, z DEc3 Po4[1'z \
ADCIN O. POBO
aDclN 1, Pc|lll
POto=PCfro + 23 so actual pulse is displayed
(arbitrary value)
PUtTSOLT PORTC.1, POTO
PAUSE FOT1 pause 1/60 seconds (appror
PUnSOttr PORTC.0,
PIUSE PdFl pause 1/60 seconds, (appro:
GOIO t OOP
END we always end with end
Noted for lhe record: in FLI'IABA systems, the se o center is defined as a 1.52 milli-
seconds wide pulse delivered about 60 times a second. The positional range is about
0.75 milliseconds on either side ofrhar. Other manufacturers speciiy other values around
1.5 milliseconds, so it is woth it to check exactly what your servos need. Develop the
habit of working to accurate parameters irnd looking things up for yourself.
In the prcceding program, the pulses to both connectols J7 an(l J8 use the same
wlue, POT'. Doing I rhis way allows us to hook a se o up to either connector, and
tbe operation will be the same, Or both servos can be connected at the same time and
you can find the end positions for both with thi s program. Both servos will not have the
same value for the open and close positions for the respecrive gates unless you can
make the linkages absolutely identtcal. POTI contmh rfr? d€ld) between the pulses. We
want to find the sho est and longest delays that give us smooth se o operation, and
then use the average.