
Page 192 - Making things move_ DIY mechanisms for inventors, hobbyists, and artists
P. 192
170 Making Things Move
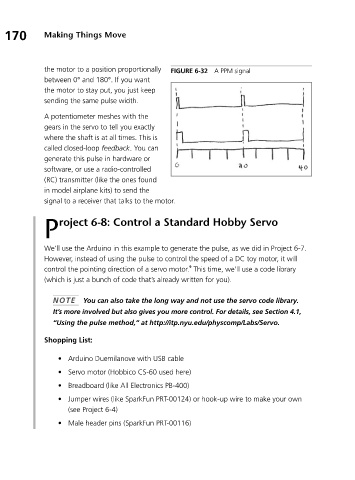
the motor to a position proportionally FIGURE 6-32 A PPM signal
between 0° and 180°. If you want
the motor to stay put, you just keep
sending the same pulse width.
A potentiometer meshes with the
gears in the servo to tell you exactly
where the shaft is at all times. This is
called closed-loop feedback. You can
generate this pulse in hardware or
software, or use a radio-controlled
(RC) transmitter (like the ones found
in model airplane kits) to send the
signal to a receiver that talks to the motor.
P roject 6-8: Control a Standard Hobby Servo
We’ll use the Arduino in this example to generate the pulse, as we did in Project 6-7.
However, instead of using the pulse to control the speed of a DC toy motor, it will
9
control the pointing direction of a servo motor. This time, we’ll use a code library
(which is just a bunch of code that’s already written for you).
NOTE You can also take the long way and not use the servo code library.
It’s more involved but also gives you more control. For details, see Section 4.1,
“Using the pulse method,” at http://itp.nyu.edu/physcomp/Labs/Servo.
Shopping List:
• Arduino Duemilanove with USB cable
• Servo motor (Hobbico CS-60 used here)
• Breadboard (like All Electronics PB-400)
• Jumper wires (like SparkFun PRT-00124) or hook-up wire to make your own
(see Project 6-4)
• Male header pins (SparkFun PRT-00116)