
Page 280 - Mathematical Techniques of Fractional Order Systems
P. 280
Design of Fractional Order Fuzzy Sliding Mode Controller Chapter | 9 269
20 20
IOSMCPD IOSMCPD
FOFSMCPD FOFSMCPD
10 10
Torque (N–m) 0 Torque (N–m) 0
–10 –10
–20 –20
0 1 2 3 4 0 1 2 3 4
Time (s) Time (s)
(A) (B)
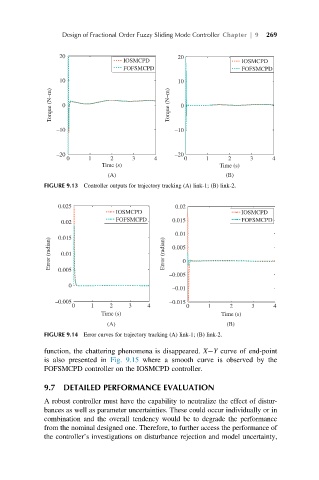
FIGURE 9.13 Controller outputs for trajectory tracking (A) link-1; (B) link-2.
0.025 0.02
IOSMCPD IOSMCPD
FOFSMCPD 0.015 FOFSMCPD
0.02
0.01
0.015
Error (radian) 0.01 Error (radian) 0.005 0
0.005
–0.005
0
–0.01
–0.005 –0.015
0 1 2 3 4 0 1 2 3 4
Time (s) Time (s)
(A) (B)
FIGURE 9.14 Error curves for trajectory tracking (A) link-1; (B) link-2.
function, the chattering phenomena is disappeared. X Y curve of end-point
is also presented in Fig. 9.15 where a smooth curve is observed by the
FOFSMCPD controller on the IOSMCPD controller.
9.7 DETAILED PERFORMANCE EVALUATION
A robust controller must have the capability to neutralize the effect of distur-
bances as well as parameter uncertainties. These could occur individually or in
combination and the overall tendency would be to degrade the performance
from the nominal designed one. Therefore, to further access the performance of
the controller’s investigations on disturbance rejection and model uncertainty,