
Page 285 - Mathematical Techniques of Fractional Order Systems
P. 285
Reference trajectory link-1 Reference trajectory link-2
2 IOSMCPD link-1 2 IOSMCPD link-2
FOFSMCPD link-1
FOFSMCPD link-2
Angular position (radian) 1 0 0.11 Angular position (radian) 1 0 0.995 0.06 0.07 0.08
1
0.99
0.1
–1
0.09 –1
0.065 0.07
–2 –2
0 1 2 3 4 0 1 2 3 4
Time (s) Time (s)
(A) (B)
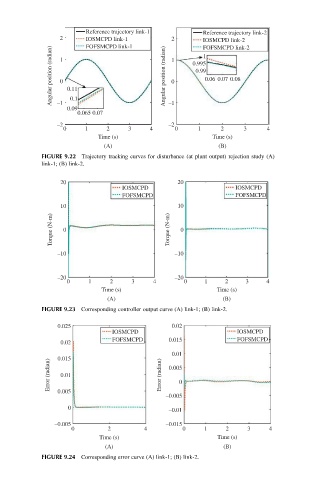
FIGURE 9.22 Trajectory tracking curves for disturbance (at plant output) rejection study (A)
link-1; (B) link-2.
20 20
IOSMCPD IOSMCPD
FOFSMCPD FOFSMCPD
10 10
Torque (N-m) 0 Torque (N-m) 0
–10 –10
–20 –20
0 1 2 3 4 0 1 2 3 4
Time (s) Time (s)
(A) (B)
FIGURE 9.23 Corresponding controller output curve (A) link-1; (B) link-2.
0.025 0.02
IOSMCPD IOSMCPD
FOFSMCPD 0.015 FOFSMCPD
0.02
0.01
0.015
Error (radian) 0.01 Error (radian) 0.005 0
0.005
–0.005
0 –0.01
–0.005 –0.015
0 2 4 0 1 2 3 4
Time (s) Time (s)
(A) (B)
FIGURE 9.24 Corresponding error curve (A) link-1; (B) link-2.