
Page 4 - Mechanical design of microresonators _ modeling and applications
P. 4
0-07-145538-8_CH01_3_08/30/05
Design at Resonance of Mechanical Microsystems
Design at Resonance of Mechanical Microsystems 3
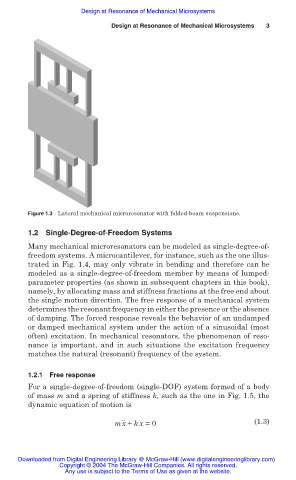
Figure 1.3 Lateral mechanical microresonator with folded-beam suspensions.
1.2 Single-Degree-of-Freedom Systems
Many mechanical microresonators can be modeled as single-degree-of-
freedom systems. A microcantilever, for instance, such as the one illus-
trated in Fig. 1.4, may only vibrate in bending and therefore can be
modeled as a single-degree-of-freedom member by means of lumped-
parameter properties (as shown in subsequent chapters in this book),
namely, by allocating mass and stiffness fractions at the free end about
the single motion direction. The free response of a mechanical system
determines the resonant frequency in either the presence or the absence
of damping. The forced response reveals the behavior of an undamped
or damped mechanical system under the action of a sinusoidal (most
often) excitation. In mechanical resonators, the phenomenon of reso-
nance is important, and in such situations the excitation frequency
matches the natural (resonant) frequency of the system.
1.2.1 Free response
For a single-degree-of-freedom (single-DOF) system formed of a body
of mass m and a spring of stiffness k, such as the one in Fig. 1.5, the
dynamic equation of motion is
..
mx + kx =0 (1.3)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.