
Page 57 - Mechanical Engineer's Data Handbook
P. 57
46 MECHANICAL ENGINEER’S DATA HANDBOOK
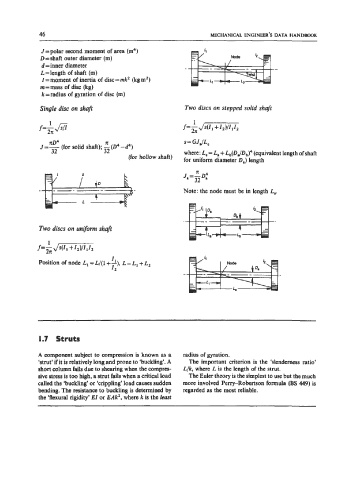
J-polar second moment of area (m4)
D=shaft outer diameter (m)
d = inner diameter
L = length of shaft (m)
I = moment of inertia of disc= mk2 (kg mZ)
m = mass of disc (kg)
k = radius of gyration of disc (m)
Single disc on shaft Two discs on stepped solid shaft
1
1
f=-&i f=-J 41, +12)/1112
2x
2n
nD4 s = GJ JLe
J=- (for solid shaft); $ (D4 -d4)
32 where: Le = La + f,b(DJDb)4 (equivalent length of shaft
-
(for hollow shaft)
for uniform diameter D,) length
I S
I D
Note: the node must be in length La.
Two discs on ungorm shajl
I
Position of node L,=L/(l+L), L=L,+L, =I1 I Node b. €3
12
1.7 Struts
A component subject to compression is known as a radius of gyration.
‘strut’ if it is relatively long and prone to ‘buckling’. A The important criterion is the ‘slenderness ratio’
short column fails due to shearing when the compres- L/k, where L is the length of the strut.
sive stress is too high, a strut fails when a critical load The Euler theory is the simplest to use but the much
called the ‘buckling’ or ‘crippling’ load causes sudden more involved Perry-Robertson formula (BS 449) is
bending. The resistance to buckling is determined by regarded as the most reliable.
the ‘flexural rigidity’ El or EAk’, where k is the least