
Page 418 - Mechanical Engineers' Handbook (Volume 2)
P. 418
7 Further Criteria for Gain Selection 409
Figure 31 Practical op-amp implementation of PID control. 1
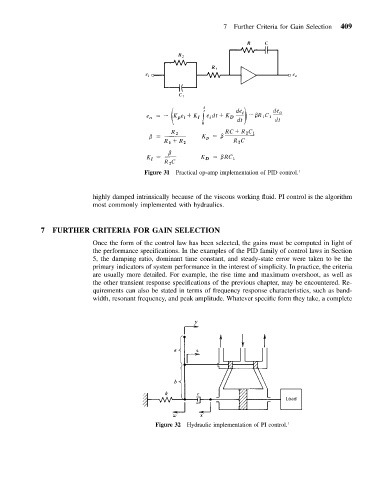
highly damped intrinsically because of the viscous working fluid. PI control is the algorithm
most commonly implemented with hydraulics.
7 FURTHER CRITERIA FOR GAIN SELECTION
Once the form of the control law has been selected, the gains must be computed in light of
the performance specifications. In the examples of the PID family of control laws in Section
5, the damping ratio, dominant time constant, and steady-state error were taken to be the
primary indicators of system performance in the interest of simplicity. In practice, the criteria
are usually more detailed. For example, the rise time and maximum overshoot, as well as
the other transient response specifications of the previous chapter, may be encountered. Re-
quirements can also be stated in terms of frequency response characteristics, such as band-
width, resonant frequency, and peak amplitude. Whatever specific form they take, a complete
Figure 32 Hydraulic implementation of PI control. 1