
Page 413 - Mechanical Engineers' Handbook (Volume 2)
P. 413
404 Basic Control Systems Design
5.4 Derivative Control
Integral action tends to produce a control signal even after the error has vanished, which
suggests that the controller be made aware that the error is approaching zero. One way to
accomplish this is to design the controller to react to the derivative of the error with derivative
control action, which is
F(s) KsE(s) (21)
D
where K is the derivative gain. This algorithm is also called rate action. It is used to damp
D
out oscillations. Since it depends only on the error rate, derivative control should never be
used alone. When used with proportional action, the following PD control algorithm results:
F(s) (K Ks)E(s) K (1 Ts)E(s) (22)
D
P
P
D
where T is the rate time or derivative time. With integral action included, the proportional-
D
plus-integral-plus-derivative (PID) control law is obtained:
F(s) K K I Ks E(s)
P
s D (23)
This is called a three-mode controller.
PD Control of a Second-Order System
The presence of integral action reduces steady-state error but tends to make the system less
stable. There are applications of the position servomechanism in which a nonzero derivation
resulting from the disturbance can be tolerated but an improvement in transient response
over the proportional control result is desired. Integral action would not be required, but rate
action can be added to improve the transient response. Application of PD control to this
system gives the block diagram of Fig. 23 with G(s) K K s.
P
D
The system is stable for positive values of K and K . The presence of rate action does
D
P
not affect the steady-state response, and the steady-state results are identical to those with
proportional control; namely, zero offset error and a deviation of 1/K , due to the distur-
P
bance. The damping ratio is (c K )/2 IK . For proportional control, c/
D
P
2 IK . Introduction of rate action allows the proportional gain K to be selected large to
P
P
reduce the steady-state deviation, while K can be used to achieve an acceptable damping
D
ratio. The rate action also helps to stabilize the system by adding damping (if c 0, the
system with proportional control is not stable).
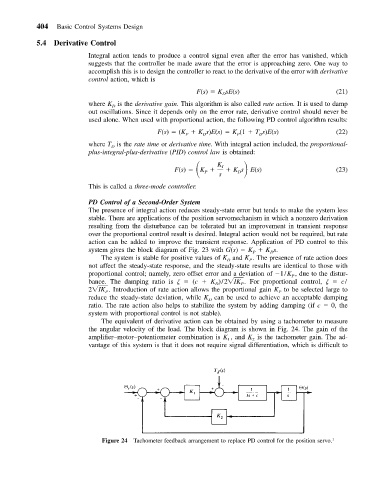
The equivalent of derivative action can be obtained by using a tachometer to measure
the angular velocity of the load. The block diagram is shown in Fig. 24. The gain of the
amplifier–motor–potentiometer combination is K , and K is the tachometer gain. The ad-
1
2
vantage of this system is that it does not require signal differentiation, which is difficult to
Figure 24 Tachometer feedback arrangement to replace PD control for the position servo. 1