
Page 410 - Mechanical Engineers' Handbook (Volume 2)
P. 410
5 Control Laws 401
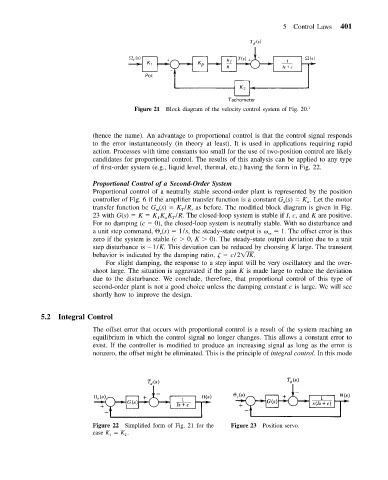
Figure 21 Block diagram of the velocity control system of Fig. 20. 1
(hence the name). An advantage to proportional control is that the control signal responds
to the error instantaneously (in theory at least). It is used in applications requiring rapid
action. Processes with time constants too small for the use of two-position control are likely
candidates for proportional control. The results of this analysis can be applied to any type
of first-order system (e.g., liquid level, thermal, etc.) having the form in Fig. 22.
Proportional Control of a Second-Order System
Proportional control of a neutrally stable second-order plant is represented by the position
controller of Fig. 6 if the amplifier transfer function is a constant G (s) K . Let the motor
a
a
transfer function be G (s) K /R, as before. The modified block diagram is given in Fig.
m
T
23 with G(s) K K K K /R. The closed-loop system is stable if I, c, and K are positive.
1
T
a
For no damping (c 0), the closed-loop system is neutrally stable. With no disturbance and
a unit step command, (s) 1/s, the steady-state output is 1. The offset error is thus
r
ss
zero if the system is stable (c 0, K 0). The steady-state output deviation due to a unit
step disturbance is 1/K. This deviation can be reduced by choosing K large. The transient
behavior is indicated by the damping ratio, c/2 IK.
For slight damping, the response to a step input will be very oscillatory and the over-
shoot large. The situation is aggravated if the gain K is made large to reduce the deviation
due to the disturbance. We conclude, therefore, that proportional control of this type of
second-order plant is not a good choice unless the damping constant c is large. We will see
shortly how to improve the design.
5.2 Integral Control
The offset error that occurs with proportional control is a result of the system reaching an
equilibrium in which the control signal no longer changes. This allows a constant error to
exist. If the controller is modified to produce an increasing signal as long as the error is
nonzero, the offset might be eliminated. This is the principle of integral control. In this mode
Figure 22 Simplified form of Fig. 21 for the Figure 23 Position servo.
case K 1 K 2 .