
Page 444 - Mechanical Engineers' Handbook (Volume 2)
P. 444
12 Hardware and Software for Digital Control 435
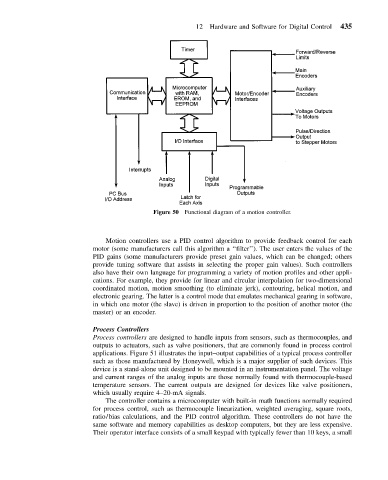
Figure 50 Functional diagram of a motion controller.
Motion controllers use a PID control algorithm to provide feedback control for each
motor (some manufacturers call this algorithm a ‘‘filter’’). The user enters the values of the
PID gains (some manufacturers provide preset gain values, which can be changed; others
provide tuning software that assists in selecting the proper gain values). Such controllers
also have their own language for programming a variety of motion profiles and other appli-
cations. For example, they provide for linear and circular interpolation for two-dimensional
coordinated motion, motion smoothing (to eliminate jerk), contouring, helical motion, and
electronic gearing. The latter is a control mode that emulates mechanical gearing in software,
in which one motor (the slave) is driven in proportion to the position of another motor (the
master) or an encoder.
Process Controllers
Process controllers are designed to handle inputs from sensors, such as thermocouples, and
outputs to actuators, such as valve positioners, that are commonly found in process control
applications. Figure 51 illustrates the input–output capabilities of a typical process controller
such as those manufactured by Honeywell, which is a major supplier of such devices. This
device is a stand-alone unit designed to be mounted in an instrumentation panel. The voltage
and current ranges of the analog inputs are those normally found with thermocouple-based
temperature sensors. The current outputs are designed for devices like valve positioners,
which usually require 4–20-mA signals.
The controller contains a microcomputer with built-in math functions normally required
for process control, such as thermocouple linearization, weighted averaging, square roots,
ratio/bias calculations, and the PID control algorithm. These controllers do not have the
same software and memory capabilities as desktop computers, but they are less expensive.
Their operator interface consists of a small keypad with typically fewer than 10 keys, a small