
Page 552 - Mechanical Engineers' Handbook (Volume 2)
P. 552
1 Introduction 543
1 INTRODUCTION
1.1 Definitions
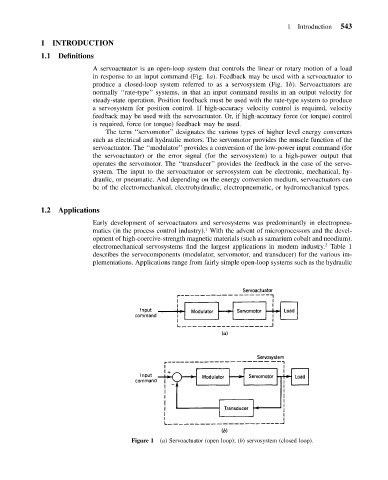
A servoactuator is an open-loop system that controls the linear or rotary motion of a load
in response to an input command (Fig. 1a). Feedback may be used with a servoactuator to
produce a closed-loop system referred to as a servosystem (Fig. 1b). Servoactuators are
normally ‘‘rate-type’’ systems, in that an input command results in an output velocity for
steady-state operation. Position feedback must be used with the rate-type system to produce
a servosystem for position control. If high-accuracy velocity control is required, velocity
feedback may be used with the servoactuator. Or, if high-accuracy force (or torque) control
is required, force (or torque) feedback may be used.
The term ‘‘servomotor’’ designates the various types of higher level energy converters
such as electrical and hydraulic motors. The servomotor provides the muscle function of the
servoactuator. The ‘‘modulator’’ provides a conversion of the low-power input command (for
the servoactuator) or the error signal (for the servosystem) to a high-power output that
operates the servomotor. The ‘‘transducer’’ provides the feedback in the case of the servo-
system. The input to the servoactuator or servosystem can be electronic, mechanical, hy-
draulic, or pneumatic. And depending on the energy conversion medium, servoactuators can
be of the electromechanical, electrohydraulic, electropneumatic, or hydromechanical types.
1.2 Applications
Early development of servoactuators and servosystems was predominantly in electropneu-
1
matics (in the process control industry). With the advent of microprocessors and the devel-
opment of high-coercive-strength magnetic materials (such as samarium cobalt and neodium).
2
electromechanical servosystems find the largest applications in modem industry. Table 1
describes the servocomponents (modulator, servomotor, and transducer) for the various im-
plementations. Applications range from fairly simple open-loop systems such as the hydraulic
Figure 1 (a) Servoactuator (open loop); (b) servosystem (closed loop).