
Page 633 - Mechanical Engineers' Handbook (Volume 2)
P. 633
624 Controller Design
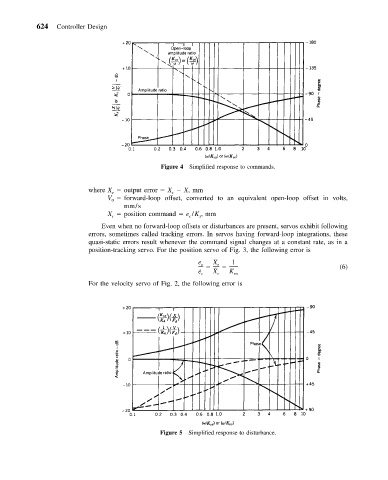
Figure 4 Simplified response to commands.
where X output error X X,mm
e
c
V forward-loop offset, converted to an equivalent open-loop offset in volts,
0
mm/s
X position command e /K ,mm
x
c
c
Even when no forward-loop offsets or disturbances are present, servos exhibit following
errors, sometimes called tracking errors. In servos having forward-loop integrations, these
quasi-static errors result whenever the command signal changes at a constant rate, as in a
position-tracking servo. For the position servo of Fig. 3, the following error is
e e X e 1 (6)
˙ e c X ˙ c K vx
For the velocity servo of Fig. 2, the following error is
Figure 5 Simplified response to disturbance.