
Page 75 - Singiresu S. Rao-Mechanical Vibrations in SI Units, Global Edition-Pearson (2017)
P. 75
72 Chapter 1 Fundamentals oF Vibration
equivalent mass of a system
example 1.11
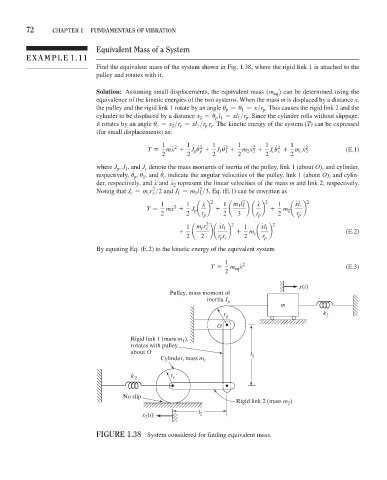
Find the equivalent mass of the system shown in Fig. 1.38, where the rigid link 1 is attached to the
pulley and rotates with it.
Solution: Assuming small displacements, the equivalent mass 1m eq 2 can be determined using the
equivalence of the kinetic energies of the two systems. When the mass m is displaced by a distance x,
the pulley and the rigid link 1 rotate by an angle u p = u 1 = x>r p . This causes the rigid link 2 and the
cylinder to be displaced by a distance x 2 = u p l 1 = xl 1 >r p . Since the cylinder rolls without slippage,
it rotates by an angle u c = x 2 >r c = xl 1 >r p r c . The kinetic energy of the system (T) can be expressed
(for small displacements) as:
1 # 1 # 1 # 1 # 1 # 1 #
2
2
2
T = mx 2 + J p u p + J 1 u 1 + m 2 x 2 2 + J c u c + m c x 2 2 (E.1)
2 2 2 2 2 2
where J p , J 1 , and J c denote the mass moments of inertia of the pulley, link 1 (about O), and cylinder,
#
#
#
respectively, u p , u 1 , and u c indicate the angular velocities of the pulley, link 1 (about O), and cylin-
#
#
der, respectively, and x and x 2 represent the linear velocities of the mass m and link 2, respectively.
2
2
Noting that J c = m c r c >2 and J 1 = m 1 l 1 >3, Eq. (E.1) can be rewritten as
# # #
1 # 1 x 2 1 m 1 l 1 2 x 2 1 xl 1 2
2
T = mx + J p ¢ ≤ + ¢ ≤ ¢ ≤ + m 2 ¢ ≤
2 2 r p 2 3 r p 2 r p
# #
1 m c r c 2 xl 1 2 1 xl 1 2
+ ¢ ≤¢ ≤ + m c ¢ ≤ (E.2)
2 2 r p r c 2 r p
By equating Eq. (E.2) to the kinetic energy of the equivalent system
1 #
T = m eq x 2 (E.3)
2
x(t)
Pulley, mass moment of
inertia J p
m
r p k 1
O
Rigid link 1 (mass m ),
1
rotates with pulley
about O l
Cylinder, mass m c 1
r
k 2 c
No slip
Rigid link 2 (mass m )
2
x 2 (t) l 2
FiGure 1.38 System considered for finding equivalent mass.