
Page 216 - Mechatronics for Safety, Security and Dependability in a New Era
P. 216
Ch41-I044963.fm Page 200 Tuesday, August 1, 2006 3:54 PM
Ch41-I044963.fm
200
200 Page 200 Tuesday, August 1, 2006 3:54 PM
CONCLUSIONS
(1) A new real-time scheduling method for the HMS is proposed, in order to generate a suitable schedule of
holons considering both the objective functions of the individual holons and the whole HMS.
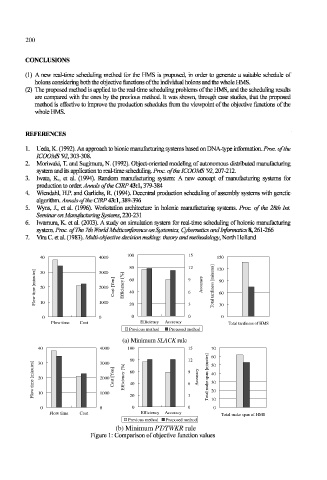
(2) The proposed method is applied to the real-time scheduling problems of the HMS, and the scheduling results
are compared with the ones by the previous method. It was shown, through case studies, that the proposed
method is effective to improve the production schedules from the viewpoint of the objective functions of the
whole HMS.
REFERENCES
1. Ueda,K. (1992). An approach to bionic manufacturing systems based on DNA-type information. Proc. qfthe
ICOOMS '92,303-308.
2. Moriwaki, T. and Sugimura, N. (1992). Object-oriented modeling of autonomous distributed manufacturing
system and its application to real-time scheduling. Proc. qfthe ICOOMS '92,207-212.
3. Iwata, K., et al. (1994). Random manufacturing system: A new concept of manufacturing systems for
production to order. Annals qfthe C1RP 43:1,379-384
4. Wiendahl, H.P. and Garlichs, R. (1994). Decentral production scheduling of assembly systems with genetic
algorithm. Annals of the CIRP 43:1,389-396
5. Wyns, J., et al. (1996). Workstation architecture in holonic manufacturing systems. Proa qfthe 28th Int.
Seminar on Manufacturing Systems, 220-231
6. Iwamura, K. et al. (2003). A study on simulation system for real-time scheduling of holonic manufacturing
system. Proa of The 7th WorldMulticonference on Systemics, Cybernetics andInformatics'8,261-266
7. Vira C. et al. (1983). Multi-objective decision making: theory and methodology, North Holland
100 15 15
40 4000 150
150
]
80 12 12 s
120
] t | e 120
s 30 3000 ] u
e
t % n i
u ] y m
n n [ 60 9 9 c
9
i y a [ 90 0
m e Y c r s ^ s
[ n AccAuycar u
20 2000 [ e c e
e t i c i a n
m s c 40 60
i o i f 6 6 d r 60
t t 1
C f a
w E
o l a
l 10 1000 t
F 20 3 3 o 30
30
T |
0 0 0 0 0 0 0
Efficiency
Accuracy
Cost
Flow time Cost Efficiency Accuracy Total tardiness of HMS
Total tardiness of HMS
Previous method
I D Previous method M Proposed method
Proposed method I
(a) Minimum SLACK rule
(a) Minimum SLACK rule
100
15
70
40 4000 100 I 1 15 70
s]
e 60
80 12 t
] u
s 30 3000 n
e ] i 50
t ] % m
u [ [
n n e 60 9 y c
i y n
m Y c a r a 40
[ 20 [ n u p
2000 t e c s
e s i c e 30
m o c i 40 6 A k
i C f a
t f
E m
w l 20
o 10 1000 a
l 20 3 t
F o
T 10
0 0 0 0 0
Accuracy
Efficiency
Flow time
Flow time Cost Efficiency Accuracy Total make span of HMS
Cost
Total make span of HMS
Previous method
| D Previous method M Proposed method
Proposed method |
(b) Minimum PT/TWKR rule
(b) Minimum PT/TWKR
rule
Figure 1: Comparison of objective function values