
Page 314 - Mechatronics for Safety, Security and Dependability in a New Era
P. 314
Ch60-I044963.fm Page 298 Thursday, July 27, 2006 9:00 AM
Ch60-I044963.fm
298
298 Page 298 Thursday, July 27, 2006 9:00 AM
Hydraulic unit
Controller unit Hydraulic unit
Controller unit
2.4 GHz
2.4 GHz
PC with
PC with nRF2401
nRF2401
wireless
Hydraulic system
transceiver
dSPACE transceiver » wireless Hydraulic system
dSPACE
DSP56F803 CAN
nRF2401 DSP56F803 CAN Moog D636 ROD426
nRF2401
Moog D636
ROD426
Sync. serial
CAN
CAN tf Sync. serial
transceiver micro- proportional valve incremental
incrementa
transceiver
micro-
proportional valve
Incr.
DSP56F803 microcontroller
controller
encoder
DSP56F803 microcontroller Sync. serial controller < Incr. encoder
Sync. serial
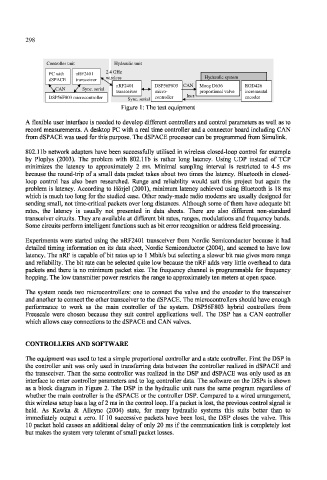
Figure 1: The test equipment
A flexible user interface is needed to develop different controllers and control parameters as well as to
record measurements. A desktop PC with a real time controller and a connector board including CAN
from dSPACE was used for this purpose. The dSPACE processor can be programmed from Simulink.
802.1 lb network adapters have been successfully utilised in wireless closed-loop control for example
by Ploplys (2003). The problem with 802.11b is rather long latency. Using UDP instead of TCP
minimizes the latency to approximately 2 ms. Minimal sampling interval is restricted to 4-5 ms
because the round-trip of a small data packet takes about two times the latency. Bluetooth in closed-
loop control has also been researched. Range and reliability would suit this project but again the
problem is latency. According to Horjel (2001), minimum latency achieved using Bluetooth is 18 ms
which is much too long for the studied case. Other ready-made radio modems are usually designed for
sending small, not time-critical packets over long distances. Although some of them have adequate bit
rates, the latency is usually not presented in data sheets. There are also different non-standard
transceiver circuits. They are available at different bit rates, ranges, modulations and frequency bands.
Some circuits perform intelligent functions such as bit error recognition or address field processing.
Experiments were started using the nRF2401 transceiver from Nordic Semiconductor because it had
detailed timing information on its data sheet, Nordic Semiconductor (2004), and seemed to have low
latency. The nRF is capable of bit rates up to 1 Mbit/s but selecting a slower bit rate gives more range
and reliability. The bit rate can be selected quite low because the nRF adds very little overhead to data
packets and there is no minimum packet size. The frequency channel is programmable for frequency
hopping. The low transmitter power restricts the range to approximately ten meters at open space.
The system needs two microcontrollers: one to connect the valve and the encoder to the transceiver
and another to connect the other transceiver to the dSPACE. The microcontrollers should have enough
performance to work as the main controller of the system. DSP56F803 hybrid controllers from
Freescale were chosen because they suit control applications well. The DSP has a CAN controller
which allows easy connections to the dSPACE and CAN valves.
CONTROLLERS AND SOFTWARE
The equipment was used to test a simple proportional controller and a state controller. First the DSP in
the controller unit was only used in transferring data between the controller realized in dSPACE and
the transceiver. Then the same controller was realized in the DSP and dSPACE was only used as an
interface to enter controller parameters and to log controller data. The software on the DSPs is shown
as a block diagram in Figure 2. The DSP in the hydraulic unit runs the same program regardless of
whether the main controller is the dSPACE or the controller DSP. Compared to a wired arrangement,
this wireless setup has a lag of 2 ms in the control loop. If a packet is lost, the previous control signal is
held. As Kawka & Alleyne (2004) state, for many hydraulic systems this suits better than to
immediately output a zero. If 10 successive packets have been lost, the DSP closes the valve. This
10 packet hold causes an additional delay of only 20 ms if the communication link is completely lost
but makes the system very tolerant of small packet losses.