
Page 30 - Modern Control Systems
P. 30
4 Chapter 1 Introduction to Control Systems
Desired output Error Actual
Controller #2 — • ( " } Controller #1 Actuator Process I »
response output
Sensor #1
Measurement output Feedback
Sensor #2
Measurement output Feedback
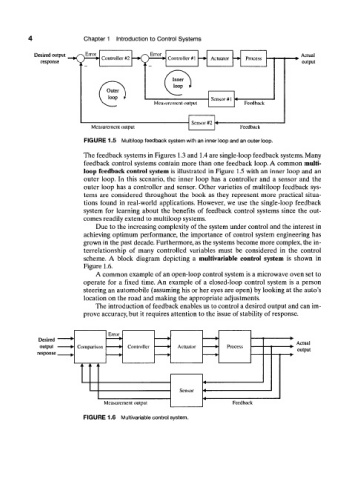
FIGURE 1.5 Multiloop feedback system with an inner loop and an outer loop.
The feedback systems in Figures 1.3 and 1.4 are single-loop feedback systems. Many
feedback control systems contain more than one feedback loop. A common multi-
loop feedback control system is illustrated in Figure 1.5 with an inner loop and an
outer loop. In this scenario, the inner loop has a controller and a sensor and the
outer loop has a controller and sensor. Other varieties of multiloop feedback sys-
tems are considered throughout the book as they represent more practical situa-
tions found in real-world applications. However, we use the single-loop feedback
system for learning about the benefits of feedback control systems since the out-
comes readily extend to multiloop systems.
Due to the increasing complexity of the system under control and the interest in
achieving optimum performance, the importance of control system engineering has
grown in the past decade. Furthermore, as the systems become more complex, the in-
terrelationship of many controlled variables must be considered in the control
scheme. A block diagram depicting a multivariable control system is shown in
Figure 1.6.
A common example of an open-loop control system is a microwave oven set to
operate for a fixed time. An example of a closed-loop control system is a person
steering an automobile (assuming his or her eyes are open) by looking at the auto's
location on the road and making the appropriate adjustments.
The introduction of feedback enables us to control a desired output and can im-
prove accuracy, but it requires attention to the issue of stability of response.
Error
Desired Actual
output Comparison Controller Actuator Process
response output
4 L 1 i i L
Sensor
N /leasure ment output Fcedbac k.
FIGURE 1.6 Multivariable control system.