
Page 29 - Modern Control Systems
P. 29
Section 1.1 Introduction 3
Desired output Controller Actuator Process Actual
response output
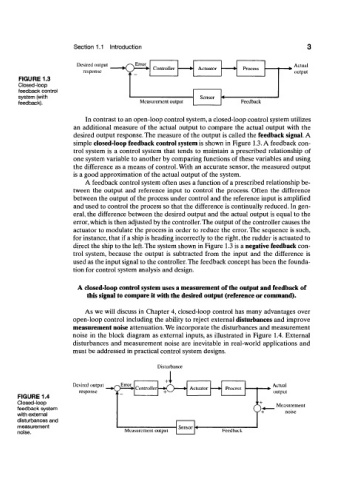
FIGURE 1.3
Closed-loop
feedback control
system (with Sensor
feedback). Measurement output Feedback
In contrast to an open-loop control system, a closed-loop control system utilizes
an additional measure of the actual output to compare the actual output with the
desired output response. The measure of the output is called the feedback signal. A
simple closed-loop feedback control system is shown in Figure 1.3. A feedback con-
trol system is a control system that tends to maintain a prescribed relationship of
one system variable to another by comparing functions of these variables and using
the difference as a means of control. With an accurate sensor, the measured output
is a good approximation of the actual output of the system.
A feedback control system often uses a function of a prescribed relationship be-
tween the output and reference input to control the process. Often the difference
between the output of the process under control and the reference input is amplified
and used to control the process so that the difference is continually reduced. In gen-
eral, the difference between the desired output and the actual output is equal to the
error, which is then adjusted by the controller. The output of the controller causes the
actuator to modulate the process in order to reduce the error. The sequence is such,
for instance, that if a ship is heading incorrectly to the right, the rudder is actuated to
direct the ship to the left. The system shown in Figure 1.3 is a negative feedback con-
trol system, because the output is subtracted from the input and the difference is
used as the input signal to the controller. The feedback concept has been the founda-
tion for control system analysis and design.
A closed-loop control system uses a measurement of the output and feedback of
this signal to compare it with the desired output (reference or command).
As we will discuss in Chapter 4, closed-loop control has many advantages over
open-loop control including the ability to reject external disturbances and improve
measurement noise attenuation. We incorporate the disturbances and measurement
noise in the block diagram as external inputs, as illustrated in Figure 1.4. External
disturbances and measurement noise are inevitable in real-world applications and
must be addressed in practical control system designs.
Disturbance
Desired output ^-^ Error ^ Actual
Controller Actuator — • Process
response A output
FIGURE 1.4
Closed-loop K Measurement
feedback system -^+ noise
with external
disturbances and
Mea surcmcnt o utput Feedback
noise.