
Page 32 - Modern Control Systems
P. 32
6 Chapter 1 Introduction to Control Systems
Water
Float
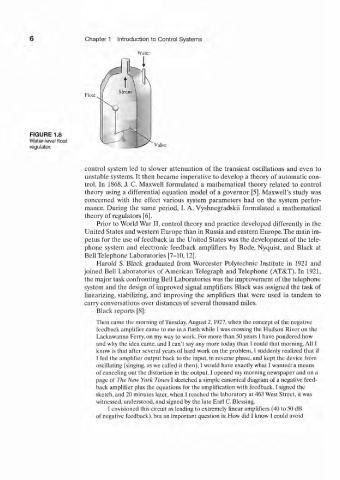
FIGURE 1.8
Water-level float
regulator. Valvt
control system led to slower attenuation of the transient oscillations and even to
unstable systems. It then became imperative to develop a theory of automatic con-
trol. In 1868, J. C. Maxwell formulated a mathematical theory related to control
theory using a differential equation model of a governor [5]. Maxwell's study was
concerned with the effect various system parameters had on the system perfor-
mance. During the same period, I. A. Vyshnegradskii formulated a mathematical
theory of regulators [6].
Prior to World War II, control theory and practice developed differently in the
United States and western Europe than in Russia and eastern Europe. The main im-
petus for the use of feedback in the United States was the development of the tele-
phone system and electronic feedback amplifiers by Bode, Nyquist, and Black at
Bell Telephone Laboratories [7-10,12].
Harold S. Black graduated from Worcester Polytechnic Institute in 1921 and
joined Bell Laboratories of American Telegraph and Telephone (AT&T). In 1921,
the major task confronting Bell Laboratories was the improvement of the telephone
system and the design of improved signal amplifiers. Black was assigned the task of
linearizing, stabilizing, and improving the amplifiers that were used in tandem to
carry conversations over distances of several thousand miles.
Black reports [8]:
Then came the morning of Tuesday, August 2,1927, when the concept of the negative
feedback amplifier came to me in a flash while I was crossing the Hudson River on the
Lackawanna Ferry, on my way to work. For more than 50 years I have pondered how
and why the idea came, and I can't say any more today than I could that morning. All I
know is that after several years of hard work on the problem, I suddenly realized that if
I fed the amplifier output back to the input, in reverse phase, and kept the device from
oscillating (singing, as we called it then), 1 would have exactly what I wanted: a means
of canceling out the distortion in the output. I opened my morning newspaper and on a
page of The New York Times I sketched a simple canonical diagram of a negative feed-
back amplifier plus the equations for the amplification with feedback. I signed the
sketch, and 20 minutes later, when I reached the laboratory at 463 West Street, it was
witnessed, understood, and signed by the late Earl C. Blessing.
I envisioned this circuit as leading to extremely linear amplifiers (40 to 50 dB
of negative feedback), but an important question is: How did I know I could avoid