
Page 125 - Modern Robotics Building Versatile Macines
P. 125
ROBOT AMBASSADOR 105
The data entering the robot as it moved was processed by three
interacting control systems. The floor reaction control dealt with
the impact and rebound of the soles of the feet on the floor and the
need to compensate for any unevenness in the surface. The target
ZMP control calculated the “zero momentum point”—the place
where there is no inertia, taking into account the Earth’s gravity
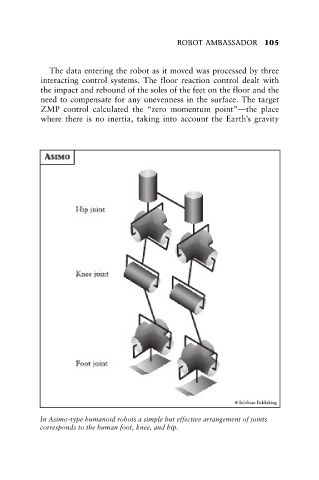
In Asimo-type humanoid robots a simple but effective arrangement of joints
corresponds to the human foot, knee, and hip.