
Page 40 - Neural Network Modeling and Identification of Dynamical Systems
P. 40
28 1. THE MODELING PROBLEM FOR CONTROLLED MOTION OF NONLINEAR DYNAMICAL SYSTEMS
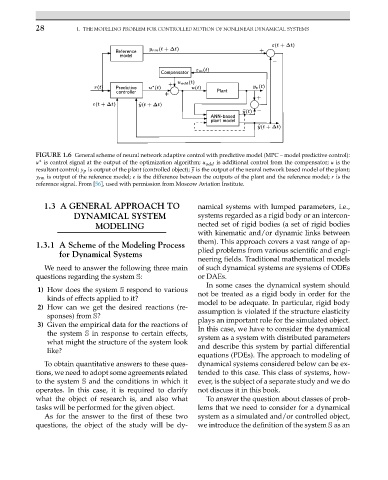
FIGURE 1.6 General scheme of neural network adaptive control with predictive model (MPC – model predictive control):
∗
u is control signal at the output of the optimization algorithm; u add is additional control from the compensator; u is the
resultant control; y p is output of the plant (controlled object); y is the output of the neural network based model of the plant;
y rm is output of the reference model; e is the difference between the outputs of the plant and the reference model; r is the
reference signal. From [56], used with permission from Moscow Aviation Institute.
1.3 A GENERAL APPROACH TO namical systems with lumped parameters, i.e.,
DYNAMICAL SYSTEM systems regarded as a rigid body or an intercon-
MODELING nected set of rigid bodies (a set of rigid bodies
with kinematic and/or dynamic links between
them). This approach covers a vast range of ap-
1.3.1 A Scheme of the Modeling Process
for Dynamical Systems plied problems from various scientific and engi-
neering fields. Traditional mathematical models
We need to answer the following three main of such dynamical systems are systems of ODEs
questions regarding the system S: or DAEs.
In some cases the dynamical system should
1) How does the system S respond to various
not be treated as a rigid body in order for the
kinds of effects applied to it?
model to be adequate. In particular, rigid body
2) How can we get the desired reactions (re-
assumption is violated if the structure elasticity
sponses) from S?
plays an important role for the simulated object.
3) Given the empirical data for the reactions of
In this case, we have to consider the dynamical
the system S in response to certain effects, system as a system with distributed parameters
what might the structure of the system look and describe this system by partial differential
like?
equations (PDEs). The approach to modeling of
To obtain quantitative answers to these ques- dynamical systems considered below can be ex-
tions, we need to adopt some agreements related tended to this case. This class of systems, how-
to the system S and the conditions in which it ever, is the subject of a separate study and we do
operates. In this case, it is required to clarify notdiscussitinthisbook.
what the object of research is, and also what To answer the question about classes of prob-
tasks will be performed for the given object. lems that we need to consider for a dynamical
As for the answer to the first of these two system as a simulated and/or controlled object,
questions, the object of the study will be dy- we introduce the definition of the system S as an