
Page 128 - Pipelines and Risers
P. 128
Finite Element Analysis of In-situ Behavior 101
In a finite element analysis, implicit dynamic solution, such as that described in Chapter 7.3.2,
is used to simulate the time-history of displacements, stresses and strain. Details are given in
Tornes et a1 (1998).
7.3 Steps in an Analysis and Choice of Analysis Procedure
A basic concept in ABAQUS is the division of the loadproblem history into steps. For each
step the user chooses an analysis procedure. This means that any sequence of load history and
desired type of analysis can be performed. For example in one static step the pipeline can be
filled with gas, in the next static step emptied, and in the third step a dynamic analysis of the
empty pipeline can be performed.
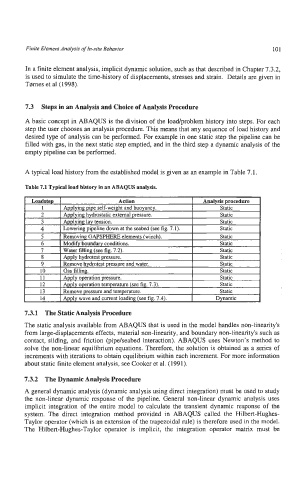
A typical load history from the established model is given as an example in Table 7.1.
Table 7.1 Typical load history in an ABAQUS analysis.
lay tension. Static
pipeline down at the seabed (see fig. 7.1). Static
GAPSPHERE elements (winch). Static
7.3.1 The Static Analysis Procedure
The static analysis available from ABAQUS that is used in the model handles non-linearity's
from large-displacements effects, material non-linearity, and boundary non-linearity's such as
contact, sliding, and friction (pipekeabed interaction). ABAQUS uses Newton's method to
solve the non-linear equilibrium equations. Therefore, the solution is obtained as a series of
increments with iterations to obtain equilibrium within each increment. For more information
about static finite element analysis, see Cooker et al. (1991).
7.3.2 The Dynamic Analysis Procedure
A general dynamic analysis (dynamic analysis using direct integration) must be used to study
the non-linear dynamic response of the pipeline. General non-linear dynamic analysis uses
implicit integration of the entire model to calculate the transient dynamic response of the
system. The direct integration method provided in ABAQUS called the Hilbert-Hughes-
Taylor operator (which is an extension of the trapezoidal rule) is therefore used in the model.
The Hilbert-Hughes-Taylor operator is implicit, the integration operator matrix must be