
Page 396 - Power Electronic Control in Electrical Systems
P. 396
//SYS21/F:/PEC/REVISES_10-11-01/075065126-CH009.3D ± 375 ± [373±406/34] 17.11.2001 10:33AM
Power electronic control in electrical systems 375
9.2 A basic worked example ± leading and lagging loads
Figure 9.1 shows a circuit with a supply system whose open-circuit voltage is E and
short-circuit impedance is Z s 0 jX s , where X s 0:1
. The load impedance is
Z 1
but the power factor can be unity, 0.8 lagging, or 0.8 leading. For each of
these three cases, the supply voltage E must be adjusted to keep the terminal voltage
V 100 V. For each case determine E, the power-factor angle f, the load angle d, the
power P, the reactive power Q, and the volt-amperes S.
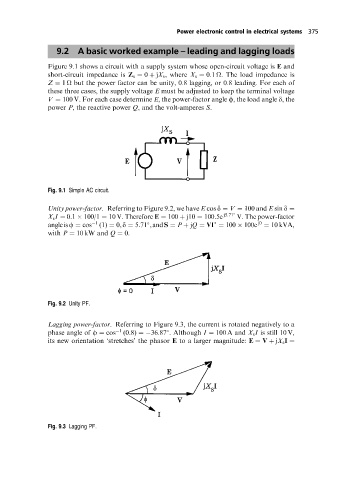
Fig. 9.1 Simple AC circuit.
Unity power-factor. Referring to Figure 9.2, we have E cos d V 100 and E sin d
X s I 0:1 100/1 10 V. Therefore E 100 j10 100:5e j5:71 V. The power-factor
j0
angleisf cos 1 (1) 0,d 5:71 ,andS P jQ VI 100 100e 10 kVA,
with P 10 kW and Q 0.
Fig. 9.2 Unity PF.
Lagging power-factor. Referring to Figure 9.3, the current is rotated negatively to a
phase angle of f cos 1 (0:8) 36:87 . Although I 100 A and X s I is still 10 V,
its new orientation `stretches'the phasor E to a larger magnitude: E V jX s I
Fig. 9.3 Lagging PF.