
Page 24 - Rapid Learning in Robotics
P. 24
10 The Robotics Laboratory
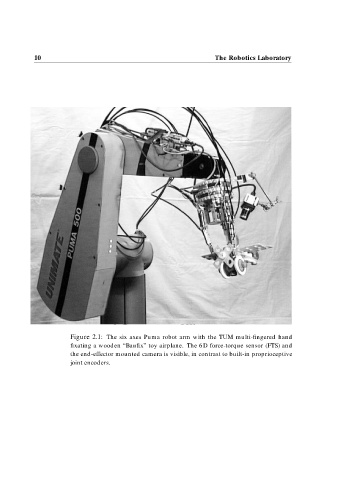
Figure 2.1: The six axes Puma robot arm with the TUM multi-fingered hand
fixating a wooden “Baufix” toy airplane. The 6 D force-torque sensor (FTS) and
the end-effector mounted camera is visible, in contrast to built-in proprioceptive
joint encoders.